Votre enfant rêve-t-il de construire et de programmer de manière indépendante un robot qui remplirait toutes ses équipes? Ensuite, nous vous recommandons vivement de détourner votre attention sur une série unique de concepteurs connus dans la société danoise mondiale de la société Lego Robots.
La Série Lego Mindstorms est une réalisation spéciale dugo. Ce n'est que ces concepteurs sont basés sur l'électromécanique et la robotique, et ils seront donc intéressés par ceux qui ont une pensée originale et un bon fantasme, ainsi que des connaissances et une compréhension de tous les processus techniques. C'est pourquoi, très souvent, l'ensemble des robots Lego devient un jouet préféré non seulement pour les gars de l'âge scolaire principal, mais aussi un passe-temps pour leurs papas et même les grands-pères.
Acheter le constructeur Lego Mindstorms, vous obtenez:
Le concepteur de jeu le plus intéressant
Les robots Lego sont un produit, qui a été fabriqué par les dernières technologies dans le domaine de la robotique. Toys Lego Mindstorms ont plusieurs moteurs, des capteurs de capteurs supplémentaires et un affichage de couleur. Les robots Lego sont capables de frapper l'imagination de tous ceux qui sont confrontés pour la première fois, car ils se comportent comme des êtres vivants. Lego Mindstorms réagit au toucher et le son peut déterminer la température de l'objet et la distance. Ils peuvent venir, avoir entendu votre coton, élever des objets proches et distinguer entre l'obscurité et la lumière. Tout cela semble assez difficile, mais la pratique montre que tout enfant qui possède un ordinateur au niveau de l'utilisateur peut programmer le concepteur de la série LEGO ROBOT sans aucun problème, créant son robot personnel. Notez que la commande Jouet Lego Mindstorms peut être donnée non seulement de l'ordinateur, mais aussi de tout téléphone mobileoù Bluetooth est installé.
Énormes opportunités pour le développement de la créativité
L'ensemble des robots Lego est plus de 500 pièces, ce qui permet de collecter un grand nombre de modifications différentes des concepteurs de robots: un animal mythologique qui ne vit que dans vos fantasmes, un robot de type humain, une voiture de l'avenir, etc. .
Produit de qualité
Avant de lancer la production série de concepteurs, tous leurs composants sont testés pour des tests de résistance aux supports de test. Chaque élément des robots Lego est conçu pour plus de 50 000 cycles d'embrayage. Pour la production d'éléments plastiques des concepteurs Lego Mindstorms, des métaux lourds et d'autres matériaux malveillants ne sont pas utilisés.
Sur les capacités en développement des concepteurs de Mindstorms Lego peuvent parler infiniment. Les robots Lego ne connaissent pas seulement nouvelles technologies, mais aussi leur utilisation. Les jeunes propriétaires de munics de Lego seront incroyablement fiers et se réjouissent quand ils écrivent et chargent notre premier robot programme d'ordinateur. Et déjà sur la fierté des parents pour leur enfant préféré, qui doit être facilement adapté aux technologies les plus récentes et ne pas avoir à parler!
Les robots dugo jouet pour adultes ont déjà réussi à conquérir des millions de fans dans toute la planète et chaque jour leur quantité augmente. Maintenant, il existe même des clubs entiers dédiés aux concepteurs des esprits Lego, dans lesquels les gens discutent des moyens d'améliorer les fonctions des robots Lego sont divisés par leurs réalisations, leurs découvertes, etc.
Acheter ici un ensemble de legoMindsorms. Et créez des jouets que dans vos mains arriveront certainement à la vie!
L'article contient une description de l'expérience d'utilisation designer Lego. Mindstorms EV3 Pour créer un prototype de robot avec son logiciel ultérieur et son contrôle manuel à l'aide de la méta-language de la commande de robot (RCML).
- Assemblage de prototype robot basé sur Designer Lego Mindstorms EV3
- Installation rapide et configuration de la RCML pour Windows
- Robot de gestion de logiciels basé sur le contrôleur EV3
- Contrôle manuel de la périphérie du robot à l'aide du clavier et du gamepad
1. Pour commencer, un prototype d'un robot a été créé à partir du designer LEGO Mindstorms EV3 à utiliser pour la programmation et le pilotage manuel.
Description du prototype du robot
Le robot a une conception semblable au châssis de la voiture. Deux moteurs montés sur le cadre ont un axe commun de rotation, qui est relié aux roues arrière à travers la boîte de vitesses. La boîte de vitesses convertit le couple en augmentant la vitesse angulaire de l'essieu arrière. Direction collectée sur la base d'une boîte de vitesses conique.





2. La prochaine étape consiste à préparer la RCML à travailler avec le concepteur Lego Mindstorms EV3.
Vous devez télécharger des archives avec des fichiers exécutables et des fichiers de bibliothèque et.
Les archives téléchargées doivent être supprimées dans le répertoire avec un nom arbitraire. Toutefois. éviter Lettres russes dans le titre.
Répertoire de contenu après le déballage des archives

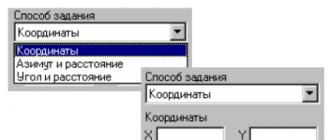
Ensuite, vous devez créer un fichier de configuration config.ini, que vous souhaitez localiser dans le même répertoire. Pour mettre en œuvre la gestion du contrôleur EV3 à l'aide du clavier et du gamepad, vous devez connecter les modules LEGO_EV3, Clavier et GamePAD.
Inscription de fichier Configuration Config.ini pour la RCML
Module \u003d Module LEGO_EV3 \u003d Module de clavier \u003d GamePad
Ensuite, le contrôleur EV3 et l'adaptateur peuvent être jumelés.
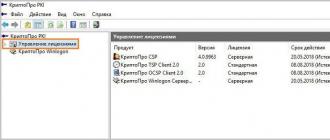
Instructions pour la conjugaison du contrôleur Adaptateur EV3 et Bluetooth
L'instruction contient un exemple de jumelage du contrôleur LEGO EV3 et du PC fonctionnant systèmes Windows 7.
1. Vous devez accéder à la section Paramètres du contrôleur EV3, suivant l'élément de menu Bluetooth.
2. Vous devez vous assurer que les paramètres de configuration définissent correctement. Sur vs "visibilité", "Bluetooth" doit être installé des tiques.

3. Vous devez aller sur le panneau de commande, puis "Périphériques et imprimantes", puis "Périphériques Bluetooth".

4. Vous devez cliquer sur le bouton "Ajout du périphérique". Une fenêtre s'ouvrira pour sélectionner les périphériques Bluetooth disponibles.

5. Vous devez sélectionner le périphérique "EV3" et cliquer sur le bouton Suivant.
6. Sur l'écran du contrôleur EV3, la boîte de dialogue Connect sera reflétée. Vous devez sélectionner l'option Cochez la case et confirmer votre choix en appuyant sur la touche centrale.

7. Suivant affiche la boîte de dialogue "PASSKEY", les numéros "1234" doivent être spécifiés dans la ligne d'entrée, puis confirmer phrase clé À coupler des appareils, en appuyant sur la touche centrale pour positionner avec l'image de la coche.

8. Un formulaire pour entrer dans l'appareil apparaîtra dans l'assistant de couplage du périphérique. Vous devez entrer le code "1234" et appuyez sur la touche "Suivant".


10. Le PC doit revenir au "Panneau de configuration", puis "Périphériques et imprimantes", puis "Périphériques Bluetooth". La liste des périphériques disponibles affichera un périphérique avec lequel un couplage a été effectué.

11. Il suit double-cliquer Entrez les propriétés de connexion «EV3».



14. L'indice de port COM spécifié dans les propriétés doit être utilisé dans le fichier de configuration Config.ini du module LEGO_EV3. L'exemple montre les propriétés Bluetooth du contrôleur LEGO EV3 à l'aide du port série COM14 standard.
La configuration supplémentaire du module est réduite au fait qu'il est nécessaire de vous inscrire dans le fichier de configuration du module LEGO_EV3, l'adresse du port COM par lequel la communication avec le robot LEGO est effectuée.
Config.ini Inscription de fichier de configuration pour le module LEGO_EV3
Connexion \u003d COM14 dynamic_connection \u003d 0
Vous devez maintenant configurer le module du clavier. Le module est situé dans le répertoire Control_Modules, puis clavier. Vous devez créer un fichier de configuration config.ini à côté du fichier Keyboard_Module.dll. Avant de créer un fichier de configuration, il est nécessaire de déterminer quelles actions doivent être effectuées en appuyant sur les touches.
Le module de clavier vous permet d'utiliser des clés ayant un code numérique spécifique. La table du code des touches virtuelles peut être visualisée.
Par exemple, j'utiliserai les clés suivantes:
- Les flèches haut / bas sont utilisées pour faire pivoter les roues arrière du moteur en avant / en arrière
- Flèches gauche / droite Rotate Roues gauche / droite
Règles pour la description des axes pour le module de clavier
1. Lors de l'ajout d'un nouvel axe, il est nécessaire de Ajoutez une propriété dont le nom est le nom de l'axe et attribuez-lui la clé au bouton du clavier. Hexagonal. Format et une entrée similaire est lancée à chaque bouton, c'est-à-dire Le nom de l'axe peut être utilisé plusieurs fois. En général, entrez à la section Il ressemblera à ceci:
Nom \u003d valeur_k_hex_formate valeur
2. Il est nécessaire de définir la valeur maximale et minimale pouvant être déposée sur cet axe. Pour cela, vous avez besoin de nouvelle chaîne Ajouter une section dans un fichier de configuration config.ini.uniforme avec l'axe des noms et les propriétés définies upper_Value. et inférieur_value.qui correspondent au maximum et au minimum de l'axe, respectivement. En général, cette section est la suivante:
[Nom] Upper_Value \u003d maximum_new_iesight moindre_value \u003d minimum_inje
3. Suivant, déterminez quelle valeur aura l'axe si le bouton est enfoncé sur le clavier, ce qui y était précédemment attaché. La définition des valeurs se produit en créant une section dont le nom est constitué du nom de l'axe et de la valeur du bouton du clavier dans Hexagonal. Format séparé par un symbole inférieur sous-cascit. Pour spécifier la valeur par défaut (non enfoncée) et appuyez sur les propriétés. nonppressed_Value. et pressé_value En conséquence, les valeurs sont transmises. La vision générale de la section dans ce cas est la suivante:
[Nom-Axis_date-boutonnez-clavier] pressé_value \u003d value_i_pri_nappa_klavish nonPRESSED_VALUE \u003d SENSIDE_I_PRY_Telated_klavish
Le texte du spoiler pour la commodité de la visualisation est copié de la documentation de la RCML.
Pour mettre en œuvre la commande de prototype de robot, le fichier de configuration du module de clavier a été créé, qui inclut les axes Go et Trotate. L'axe Go est utilisé pour spécifier la direction du mouvement du robot. Lorsque vous appuyez sur la touche "FROUCHE UP", l'axe obtiendra la valeur 100, lorsque vous appuyez sur la touche "Flèche Down", l'axe valorisera -5050. L'axe de rotation est utilisé pour régler l'angle de rotation des roues avant. Lorsque vous appuyez sur la touche "flèche gauche", la valeur de l'axe sera de -5, lorsque vous appuyez sur "flèche à droite", l'axe prendra la valeur 5.
Config.ini Inscription de fichier de configuration pour le clavier de module
; Section obligatoire; titre_ \u003d cod_klavishche (en format hexagone); l'axe Go obtient les valeurs de la flèche_love Go \u003d 0x26; l'axe de goûte obtient les valeurs des flèches. Allez \u003d 0x28; Tourner axe obtient des valeurs à partir de arrows_vlevo rotate \u003d 0x25; la rotation axe obtient des valeurs à partir de flèches \u003d 0x27; Description de l'axe Go, doit toujours avoir les deux touches; la limite supérieure des valeurs du go haut_value \u003d -100 axe; la limite inférieure de Les valeurs d'axe de go moins_value \u003d 100; la description de l'axe de rotat doit toujours avoir les deux touches; la limite supérieure de l'axe de rotation supérieure_value \u003d - - 100; limites inférieures de la rotation inférieure_value \u003d 100 valeurs de l'axe; description du GO AXIS Comportement pour la touche * arrow_love * (0x26); lorsque la touche est enfoncée * (0x26) lorsque la valeur de l'axe est réglée sur 50 pression_value \u003d 100; lorsque la clé est relâchée. Nonppressiond_value \u003d 0; Description du comportement de la Allez axe pour la clé * arrow_nuch * (0x28); lorsque vous appuyez sur la touche * la valeur arrow_liza * La valeur de l'axe est définie sur -50 appuyée sur_value \u003d -50; quand Touches de libération * arrow_ving * Valeur de l'axe réglé sur 0 non Dressed_value \u003d 0; Rotation Axe Comportement Description de la clé * arrow_vlevlo * (0x25); lorsque vous appuyez sur la valeur * arrow_number * La valeur de l'axe est réglée sur -5 enfoncée \u003d -5; quand la clé est relâché * valeur axe pour régler égal à 0 non Dressed_value \u003d 0; Tourner la description du comportement de l'axe de la touche * (0x27) (0x27); lorsque vous appuyez sur la touche * arrow_number * la valeur de l'axe défini sur 5 pression_value \u003d 5; La clé est relâchée le * arrow_number * La valeur de l'axe est définie sur 0 nonppressed_value \u003d 0.
Ensuite, pour mettre en œuvre le contrôle à l'aide de GamePad, vous devez configurer le module de jeu. Configuration du module comprend la création d'un fichier de configuration Configuration config.ini à côté du gamepad_module.dll situé dans le répertoire Control_Modules, puis sur GamePad.
Fichier de configuration universelle du module pour interaction avec GamePad
; La section obligatoire de la description des axes d'occasion; l'axe pour compléter la sortie du mode de contrôle manuel \u003d 9; 11 axes binaires correspondant aux boutons de GEYMPAD B1 \u003d B2 \u003d 1 2 3 B3 \u003d B4 \u003d 4 L1 \u003d L2 \u003d 7 5 R1 \u003d R2 \u003d 8 6 START \u003d 10 T1 \u003d T2 \u003d 11 12; 4 essieux de bâtons, le style de droite haut / bas rtud \u003d 13; mouvement bâton gauche à droite / droite RTLR \u003d 16; joysticks gauche haut / bas mouvement Ltud \u003d 15; mouvement stick gauche gauche / droite LTLR \u003d 14; 2 traverser des axes; le mouvement de la croix / bas arrofrowsud \u003d 17; mouvement du flèche croisée / droite / droite \u003d 18; Description du comportement de l'axe B1; Lorsque vous appuyez sur la touche B1, la valeur de l'axe est définie sur 1 upper_Value \u003d 1; lorsque le bouton B1 est relâchée, la valeur de l' axe est positionné à 0 lower_Value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 upper_value \u003d 1 lower_value \u003d 0 Upper_Value \u003d 1 Lower_Value \u003d 0 Upper_Value \u003d 1 Lower_Value \u003d 0; description du comportement de l'axe de la droite est le mouvement de haut / vers le bas, la valeur de l'axe lors du déplacement vers la position supérieure maximale possible Upper_Value \u003d 0, la valeur de l'axe lors du déplacement vers la position inférieure maximale possible Lower_Value \u003d 65535 Upper_VALUE \u003d 0 Lower_VALUE \u003d 65535 Upper_Value \u003d 0 Lower_Value \u003d 65535 Upper_Value \u003d 0 Lower_Value \u003d 65535; Description du comportement du mouvement des axes croisés Haut / bas; valeur axe lorsque vous appuyez sur Upper_Value \u003d 1; valeur de l'axe lorsque vous appuyez sur la flèche vers le bas Downer_value \u003d -1 Upper_Value \u003d 1 inférieur_value \u003d -1
Des informations supplémentaires sur les fonctionnalités de la configuration du module GamePad s'affichent dans le Guide de référence de la RCML.
3. L'étape suivante consiste à écrire un programme dans la langue de la GRC.
À la racine du répertoire créé, vous devez créer un fichier de programme. Le nom du programme du programme et son extension peut être tout, mais les lettres russes doivent être évités dans le titre. L'exemple utilise le nom de fichier - Hello.rcml.
Pour le module LEGO_EV3 code de programme Robot de réservation a suivant apparence:
@tr \u003d robot_lego_ev3;
Les fonctions prises en charge par la plupart du contrôleur sont décrites sur la page du module LEGO_EV3. À titre d'exemple, un programme a été créé pour entrer automatiquement le robot dans un dérapage.
L'algorithme du programme est le suivant:
Après avoir réservé le premier robot gratuit, la connexion de deux moteurs est établie pour un travail ultérieur avec eux, comme avec un. Ensuite, le robot commence à effectuer des dérives. La description du programme de l'action du robot vous permet de définir avec précision les angles de rotation des roues avant et la vitesse de rotation de l'arrière. L'utilisation de cette réception vous permet d'obtenir des résultats difficiles à répéter lors du pilotage manuel du clavier ou du jeu de jeu.
Programmes d'inscription pour le robot LEGO dans la RCML
fonction principale () (@TR \u003d robot_lego_ev3; // Réservation du @ TR-\u003e SettrackveHicle ("B", "C", 0,0); // Synchronisation du moteur de réglage @ TR-\u003e Motormoveto ("D", 100 , 0,0); système.sleep (500); @ tr-\u003e trackvehicleforward (-100); système.sleep (1000); @ tr-\u003e moomroveto ("D", 50, -50,0); système.sleep ( 4000); @ tr-\u003e motormoveto ("d", 50.50.0); système.sleep (4000); @ tr-\u003e trackvehicleoff (); système.sleep (1000);)
Pour compiler le programme, vous devez utiliser la ligne de commande de la fenêtre. Premièrement, vous devez passer au répertoire créé avec des fichiers exécutables RCML_COMPILER.EXE et RCML_IntePreter.exe. Ensuite, vous devez entrer les commandes suivantes.
Équipe pour compiler le fichier hello.rcml:
Rcml_compiler.exe hello.rcml hello.rcml.pc.
À la suite de la compilation, dans le répertoire créé apparaîtra nouveau fichier. Hello.rcml.pc.
Équipe d'écran de la ligne après la compilation réussie

Vous devez maintenant vous assurer que le contrôleur EV3 est activé, associé à un adaptateur Bluetooth. Le gamepad doit être connecté au PC. Après cela, vous devez exécuter la commande d'exécution du fichier de programme:
Rcml_intepreter.exe hello.rcml
Apparence ligne de commande Dans l'exécution du programme

La vidéo démontrant le programme de mouvement du robot est située au bas de l'article.
4. Étape suivante - Robot de gestion en mode manuel à l'aide du clavier.
Avec le clavier, il est possible de contrôler n'importe quel moteur de robot. Dans le cadre de l'exemple, les mécanismes suivants sont gérés:
- Un angle de rotation des roues avant
- La direction de rotation des roues arrière
Inscription Interaction du clavier et robot LEGO sur le contrôleur EV3
fonction principale () (@TR \u003d robot_lego_ev3; // Réservation du robot @ TR-\u003e SettrackveHicle ("B", "C", 0,0); // Définissez la synchronisation des moteurs System.Hand_Control (@TR, " clavier "," droit "," go "," speedmotord "," rotation ");)
Ensuite, vous devriez compiler le programme et l'exécuter. Le résultat de la commande manuelle du robot LEGO avec le clavier est indiqué sur la vidéo au bas de la page.
5. En plus du clavier, le module de jeu est disponible permettant de manipuler le robot avec un jeu de jeu. Pour mettre en œuvre la commande de robot à l'aide du jeu de jeu, il est nécessaire de décrire au niveau du programme, quels axes du robot prendra les valeurs des axes du jeu de jeu.
Liste de gamepad et robot Lego
fonction principale () (@TR \u003d robot_lego_ev3; // Réservation du robot @ tr-\u003e settrackvehicle ("B", "C", 0,0); // Définir la synchronisation du système System.Hand_Control (@TR, "Gamepad "," Droit "," Rtud "," SpeedMotord "," RTLR ");)
Ensuite, vous devez répéter le processus de compilation du programme, puis de l'exécuter. Ce qui suit montre le résultat de la commande manuelle Lego par un robot avec un jeu de jeu et toutes les façons connectées précédemment:
L'article n'a brièvement montré que certaines fonctionnalités de la RCML. Les plus description détaillée Être dans le manuel de référence.
Mots clés:
- lego Mindstorms.
- robotique
- programmation
Le constructeur Lego Mindstorms est un ensemble de blocs électroniques et de pièces maquillées conçues pour créer un robot programmable. Le premier ensemble de Mindstorms Lego a réalisé en 1998 et, après 8 ans, en 2006, la première version de l'ensemble Lego Mindstorms NXT 1.0 a été publiée, après 3 ans, en 2009, la deuxième version de la SET - Lego Mindstorms NXT 2.0 a été publié et enfin, en 2013, un ensemble de Mindsorms Lego EV3 est apparu.
L'ensemble Lego Mindstorms comprend à la fois des détails de LEGO standard, tels que des axes, des engrenages, des poutres, des roues et des servomoteurs, ainsi que des moteurs, des capteurs et un bloc programmable. Ces ensembles sont divisés en ressources et basiques.
L'ensemble de base de Lego Mindstorms NXT a trois versions:
Lego Mindstorms contient 577 parties, 2006. C'est la première version de l'ensemble commercial;
9797 LEGO. Mindstorms Education. Le jeu de base NXT contient 431 détails, version 2006. Il - ensemble de base pour apprendre, ensemble éducatif;
8547 Lego Mindstorms NXT 2.0 contient 619 pièces, la version 2009. Ceci est la deuxième version de l'ensemble commercial.
Chacun des trois ensembles comprend le bloc Intelligent NXT de la même version. Le micrologiciel est différent, mais sont facilement mis à jour. Les ensembles peuvent donc être pris en compte en principe équivalent.
Ensemble de ressources Lego Mindstorms Education Resource Set a deux versions:
9648 LEGO Mindstorms Ensemble de ressources éducatives;
9695 Mindstorms Lego Mindstorms Education Resource Set.
L'ensemble de ressources de la version 2010 contient 817 parties, ils sont plus divers.
Le jeu de base 2013 de la version de Lego Mindstorms EV3 3.0 est fourni dans une version 31313 et contient 601 parties. "EV" est déchiffré ici comme évolution.

Lego Mindstorms Ensembles sont équipés de blocs de contrôle sur des microcontrôleurs de plusieurs versions de RCX, NXT et EV3. Actuellement, leurs trois, en outre, il existe des modifications 1.0; 2.0 et 3.0.
Un grand nombre de capteurs terminés, lego Mindstorms définit une large opportunité de créativité. Les capteurs produisent et les fabricants tiers, tels que les esprits d'esprit et hitechnique. Voici quelques exemples de capteurs standard pour le LEGO Mindstorms NXT: Tachoméomètre NXT, capteur de distance NXT ultrasonore, capteur Touch NXT, capteur de son NXT, capteur de lumière NXT. Généralement, la liste est assez vaste.
Regardons ce qui est un ensemble de Mindsorms Lego EV3.

Quant aux remplissages EV3, le bloc intelligent est équipé du processeur SITARA AM1808 (Arm9) de 300 MHz des instruments Texas, a 64 Mo mémoire vive, 16 Mo de mémoire flash, disposez également d'une fente de carte mémoire microSDHC à 32 Go. En stock Hôte USB et Bluetooth, une connexion Wi-Fi est possible via le dongle USB, les périphériques Apple sont pris en charge. En outre, l'unité est équipée d'un écran LCD monochrome, résolution de 178x128. Tous les moteurs et les capteurs NXT sont entièrement compatibles avec l'unité EV3. À propos, le bloc NXT peut être programmé sous EV3, mais certaines fonctions ne seront pas disponibles.
La boîte avec un concepteur peut être déployée dans la piste avec des zones multicolores et les capteurs de couleur interagissent parfaitement avec eux. Les détails dans la case sont initialement décomposés en plusieurs sachets distincts. De plus, il existe un ensemble d'autocollants et d'instructions.
Le bloc EV3 intelligent est le cœur du concepteur. Le pouvoir est effectué 6. piles à doigts. 6 boutons servent de contrôle et le rétro-éclairage a trois modes de couleur Les indications. Pour connecter les capteurs, il existe 4 ports d'entrée, il existe également 4 ports de sortie de commande. Pour connecter le bloc à un ordinateur - la prise MINIUSB, le port hôte USB pour l'organisation de connexions, le haut-parleur intégré et, comme mentionné précédemment, la fente de la carte mémoire. L'interface de programme vous permet de créer et de configurer des programmes directement à partir du bloc.
En plus du bloc intelligent, le kit comprend:

2 grands servomoteurs équipés de capteurs de rotation précis et peuvent développer 170 révolutions par minute avec un couple maximal de 40 NSM.

Il existe également un servomoteur moyen, le couple est inférieur à 12 NSM, cependant, le chiffre d'affaires peut atteindre 250 par minute.

Le capteur de couleur et d'éclairage avec la capacité de distinguer 8 couleurs avec une fréquence d'enquête à 1 kHz.

Capteur tactile capable de reconnaître un clic, toucher, exempter et compter leur numéro.

Le capteur de distance IR, selon le cas et pour le DU, capable de recevoir un signal, même avec 2 mètres, avec une plage de mesure de distance de distance jusqu'à 70 cm. Disponible en 4 canaux pour une réception individuelle de signaux.

Phare infrarouge pour un capteur IR peut fonctionner comme télécommande. Le boîtier a un voyant de voyant de voyant vert et un commutateur de canal. Il peut trahir 4 canaux séparés dans un rayon à 2 mètres. S'éteint automatiquement après une heure de temps d'arrêt. Il se nourrit de deux piles Mizinechik.

En plus des capteurs inclus, d'autres capteurs peuvent être utilisés:
Un capteur gyroscopique pour mesurer les mouvements de rotation du robot avec une précision de 3 degrés, sensible aux moments à 440 degrés par seconde. Fréquence d'enquête jusqu'à 1 kHz.
Capteur à ultrasons servant à mesurer des distances en transmettant et en recevant des ondes réfléchies. Il peut fonctionner comme un sonar et un récepteur d'ondes sonores comme des signaux de contrôle. Il est capable de mesurer des distances à 2,5 mètres avec une précision de 1 cm.
Non seulement les capteurs et les accessoires Lego sont pris en charge, mais également des modèles tiers, tels que les mentalités d'esprit et hitechnic. Cela peut être des joysticks, des compas, des accéléromètres, etc. Assortiment de toutes sortes de solutions est très, très large.

Pour la programmation, un robot peut être utilisé logiciel Lego Mindstorms Ev3 Home Edition pour Windows ou OS X, qui est facilement téléchargé sur le site Web officiel Lego. Il existe également une abondance de micrologiciels, de matériel de formation sur la programmation, des vidéos, des instructions interactives, des descriptions de missions.
Bien sûr, EV3 peut être contrôlé à partir d'un smartphone sur Android ou iOS, car il existe des applications distinctes. La programmation est possible et sur Java et sur une variété d'autres langues: ASM / C / C ++ / PERL / Python / Ruby / VB / HASKELL / LISP / MATLAB / LabVIEW.

Sur le site officiel de Lego, vous pouvez trouver 17 modèles avec des instructions pour assembler différents robots à partir du kit EV3. Voici ces modèles:
Track3R est un robot sur le mouvement suivi d'une grande passabilité avec quatre outils interchangeables.
Spik3R - Robot Scorpio, peut se retourner fortement, saisissez les objets de concasseur de la griffe et la fermeture à glissière de la queue empêchera tout ce qui sera sur son chemin.
R3PTAR - Robot de Cobob's 35cm, peut glisser sur le sol, attaquer des objets avec des crocs à grande vitesse.

GRIPP3R - Ce robot est capable de soulever la gravité, peut capturer, lever et lancer une boîte d'étain.
Ev3Storm est un robot sur une bouge de chenilles avec de nombreuses missions.
Bobb3e - Chargeur de robot Bobcat® télécommande À travers les boutons IR phare, il peut déplacer ou élever divers objets.
Banner Print3r est une imprimante robot. Il sait dessiner par le marqueur habituel, conduisant des lignes. Vous pouvez définir votre propre dessin.

Le camion RAC3 est un camion de course sur la télécommande. Vous pouvez ajouter une remorque.
Dinor3x - Robot Triceratops marche et tourne quatre pattes.
KRAZ3 - Robot réagit au phare IR de son ami-bug. Vous pouvez également contrôler le robot à l'aide d'un programme ou d'un programme sur mesure afin qu'il se déplace exclusivement pour le bogue;
EV3D4 - créé basé sur "Star Wars", peut suivre le propriétaire, naviguer dans la lumière IR, communiquer. Prend en charge un ensemble de scripts étendu pouvant être programmé et développer en utilisant NOUVEAU par EV3.

Guitare El3Ctric - Frapper une chaîne, trier les doigts sur le chagrin, à l'aide du système de trémol, vous pouvez effectuer incroyable solo sur cette guitare!
EV3MEG est un robot adjoint, capable de se déplacer exactement le long des lignes d'une certaine couleur, grâce au capteur d'éclairage. Reçoit des obstacles au chemin et réagit à eux. Il est capable de bouger à la fois indépendamment et de gérer à l'aide d'un phare IR.
EV3 - Le jeu de robot est capable de cacher une balle sous la tasse, puis de changer les tasses dans des endroits et vous devrez deviner où la balle. L'utilisation d'un phare IR peut être définie.

Mr.B3AM - Mesures Longueur du faisceau technique Lego® définit la couleur et la taille des faisceaux.
Robodoz3r - bulldozer robot. Peut bouger de manière indépendante ou contrôlée à distance. Efface le chemin, dépose et poussant hors de la voie à interférer des objets.
En raison du fait que ces ensembles sont obligés de penser, simuler, inventer, en général, invité à la créativité et au développement, il n'est pas du tout surprenant que dans une variété de pays, une formation dans des collèges et des écoles avec l'utilisation des ensembles de l'esprit de l'esprit Lego est largement mis en œuvre.

Les compétitions de robots sont devenues très populaires dans lesquelles chaque établissement d'enseignement peut mettre leurs équipes de bâtiments robots pour des compétitions. Ces compétitions et en Russie ont lieu, le plus célèbre de tels événements - Robofest. Le meilleur du meilleur va au monde Robot Olympiade - WRO (World Robot Olympiad).
Où acheter Lego Mindstorms EV3?
Le prix des munitions Lego EV3 dépend de l'ensemble du recrutement. Diverses configurations de Mindsorms Lego, ses versions éducatives peuvent être achetées à partir de vendeurs spécialisés de l'éducation Lego.
Andrey Misa
Constructeur LEGO. - Il s'agit d'un matériau plus polyvalent qu'il peut sembler à première vue. Après tout, avec elle, vous pouvez construire non seulement des voitures et des maisons de jouet, mais aussi des conceptions assez compliquées, par exemple, robots sous le contrôle d'un téléphone portable. Voici des ensembles similaires appelés Mindstorm EV3. Et a récemment fourni la société danoise lors de l'exposition CES 2013 à Las Vegas.

L'année dernière, un écolier américain âgé de quatorze ans est devenu célèbre pour l'ensemble du monde technique en créant à partir de Lego, capable de dessiner un stylo de pointe feutre défini par les dessins de l'utilisateur. Et dans la société danoise de 2013 et elle-même a publié un produit avec un nom similaire - Mindstorm EV3. Mais ce n'est pas une imprimante, mais des robots préfabriqués collectés à la main à partir des détails du concepteur mentionné ci-dessus.

La base de l'esprit EV3 est une similitude similaire de l'unité système, un petit ordinateur basé sur le processeur de bras fonctionnant fonctionnant. systèmes Linux. Il dispose de 16 mégaoctets de mémoire flash intégrée, de 64 mégaoctets de mémoire opérationnelle, d'un emplacement d'expansion pour cartes SD, ainsi que d'un module Wi-Fi.
Cette unité système Et ce sera le "cerveau" du robot, que chaque propriétaire de l'esprit Mindstorm EV3 sera capable de se recueillir, à la suite des instructions du fabricant ou de conduire à leur talent technique technique.

Le module contrôlera les actions de ce robot, en fonction du programme pré-installé sélectionné ou de l'algorithme écrit par l'utilisateur lui-même.
De plus, Lego promet que le robot Ev3 Mindstorm peut également interagir avec des téléphones mobiles en cours d'exécution systèmes d'exploitation Android et iOS. Il ne suffira que d'établir des logiciels spéciaux sur eux afin que seuls les mouvements des doigts sur l'écran du smartphone contrôlent les actions des collections seulement propres mains Robot.

Le kit Lego Mindstorm EV3 comprend 594 détails, et il sera possible de collecter le robot le plus simple avec celui-ci en seulement 20 minutes. Le fabricant promet de commencer à vendre ce concepteur inhabituel en 2013.
Le capteur infrarouge entre dans la version Home de l'ensemble Lego Mindstorms EV3. C'est le seul capteur qui peut être utilisé à la fois indépendamment et dans une paire avec une balise infrarouge, qui fait également partie d'un ensemble de foyer. Nous consacrerons les deux cours suivants pour étudier ces deux appareils, ainsi que leur interaction entre eux.
8.1. Nous étudions le capteur infrarouge et le phare infrarouge
(Fig. 1) Dans son travail utilise des vagues légères, invisibles pour les vagues infrarouges de l'homme * . Les mêmes ondes sont utilisées, par exemple, des panneaux de contrôle à distance de divers modernes modernes appareils ménagers (TVS, appareils vidéo et musicaux). Capteur infrarouge en mode "Approximation" Envoie indépendamment des ondes infrarouges et, attraper un signal réfléchi, détermine la présence d'un obstacle devant eux. Deux autres modes de fonctionnement du capteur infrarouge implémentent dans une paire avec une balise infrarouge (Fig. 2). En mode "À distance"le capteur infrarouge peut déterminer la pression des boutons de balise infrarouge, ce qui vous permet d'organiser la télécommande du robot. En mode "Phare" Le phare infrarouge envoie des signaux permanents par lesquels le capteur infrarouge peut déterminer la direction approximative et l'éloignement de la balise, ce qui vous permet de programmer le robot afin qu'il suit toujours le phare infrarouge. Avant d'utiliser le phare infrarouge, vous devez installer deux batteries AAA.Figure. une

Figure. 2.
8.2. Capteur infrarouge. Mode "approximation"
Ce mode de fonctionnement du capteur infrarouge est similaire au mode permettant de déterminer la distance du capteur à ultrasons. La différence réside dans la nature des ondes légères: si les ondes sonores sont reflétées de la plupart des matériaux presque sans atténuation, non seulement les matériaux affectent le reflet des ondes lumineuses, mais aussi la couleur de la surface. Couleurs sombres, contrairement à la lumière, absorber le flux de lumière plus fort, ce qui affecte le fonctionnement du capteur infrarouge. La plage de fonctionnement du capteur infrarouge est également différente de l'échographie - le capteur affiche les valeurs dans 0 (Le sujet est très proche) à 100 (Le sujet est loin ou non détecté). Une fois encore, nous soulignons: le capteur infrarouge ne peut pas être utilisé pour déterminer la distance exacte à l'objet, car sur son témoignage dans le mode "approximation" affecte la couleur de la surface de l'objet à l'étude. À son tour, cette propriété peut être utilisée pour distinguer des objets lumineux et sombres situés à une distance égale au robot. Avec la tâche de déterminer l'obstacle devant eux, le capteur infrarouge s'échappe avec succès.
Je vais résoudre la tâche pratique comme Tâche №14 Leçon Numéro 7Mais ne pas répéter, compliquer la condition d'exigences supplémentaires.
Numéro de tâche 17: Écrivez le programme un robot en mouvement simple, qui s'arrête devant un mur ou un obstacle quittant un petit dos, tournant de 90 degrés et continue de passer à l'obstacle suivant.
Robot recueilli par des instructions petit robot-31313Le capteur infrarouge est installé devant le mouvement. Connectez-le câble avec port "3" Module EV3 et procéder à la création d'un programme.
Considérez le bloc de programme "Attente" Palette orange, le poussant en mode: - "Comparaison" - "Approximation" (Fig. 3). Dans ce mode Software Block "Attente" Il a deux paramètres d'entrée: "Type de comparaison" et "Au seuil". Nous savons déjà comment configurer ces paramètres.

Figure. 3.
Décision:
- Commencer directement
- Attendez que la valeur seuil du capteur infrarouge devienne moins de 20
- Arrête d'aller de l'avant
- Revenir par 1 chiffre d'affaires de moteurs
- Tournez à droite à 90 degrés (en utilisant la connaissance de la leçon numéro 3, calculez l'angle de rotation nécessaire des moteurs)
- Continuez l'exécution des paragraphes 1 à 5 dans un cycle infini.
Essayer de décider Numéro de tâche 17 Seul, ne pas regarder dans la solution.

Figure. quatre
Et maintenant pour la fixation du matériau, essayez d'adapter la solution. Tâches №15 Leçon №7 À l'utilisation d'un capteur infrarouge! Arrivé? Partagez vos impressions dans le commentaire sur la leçon ...
8.3. Télécommande par un robot avec un phare infrarouge
Un phare infrarouge, qui fait partie du concepteur LEGO Mindstorms EV3, une paire avec un capteur infrarouge vous permet de mettre en œuvre une télécommande du robot. Nous serons familiarisés avec le phare plus proche:
- Utilisation de la balise infrarouge, envoyez un émetteur de signal (Fig. 5 Pos. 1) sur le côté du robot. Entre le phare et le robot, il ne devrait y avoir aucun obstacle! Grâce au grand coin de l'examen, le capteur infrarouge prend des signaux en toute confiance, même si la balise est située derrière le robot!
- 5 boutons gris sont situés sur le corps de la balise (Fig. 5 Pos. 2)En appuyant sur le capteur infrarouge reconnaît et transmet les codes de presse au programme Robot.
- Utilisation d'un commutateur rouge spécial (Fig. 5 Pos. 3) Vous pouvez choisir l'un des quatre canaux pour communiquer une balise et un capteur. Cela se fait pour que plusieurs robots puissent être gérés à proximité.

Figure. cinq
Numéro de tâche 18: Écrivez un programme de contrôle à distance avec un robot à l'aide d'un phare infrarouge.
Nous savons déjà que pour mettre en œuvre la possibilité de choisir les blocs d'exécution que vous devez utiliser le bloc de programme. "Changer" Palette orange. Définir le mode de fonctionnement du bloc "Changer" dans - "La mesure" - "Remote" (Fig. 6).

Figure. 6
Pour activer la connexion entre le capteur infrarouge et le phare, il est nécessaire d'établir la valeur correcte du paramètre "Canal" (Fig. 7 pos. 1) Conformément au canal sélectionné sur le phare! Chaque bloc de conteneur logiciel "Changer" Il est nécessaire de comparer l'un des options possibles Appuyer sur les touches grises (Fig. 7 Pos. 2). Remarque: certaines options incluent simultanément appuyer sur deux touches (les touches enfoncées sont marquées de rouge). Total dans le bloc de programme "Changer" Dans ce mode, vous pouvez traiter 12 Des conditions différentes (l'une des conditions doit être sélectionnée par la condition par défaut). Les conteneurs de programme sont ajoutés au bloc. "Changer" appuyer sur "+" (Fig. 7 Pos.3).

Figure. 7.
Nous proposons de mettre en œuvre le prochain algorithme de gestion du robot:
- En appuyant sur le bouton supérieur gauche inclut la rotation du moteur gauche, le robot se tourne vers la droite (Fig. 7 Pos. 2 Signification: 1)
- En appuyant sur le bouton supérieur droit inclut la rotation du moteur droit, le robot tourne à gauche (Fig. 7 Pos. 2 Signification: 3)
- Pressage simultané sur la partie supérieure gauche et boutons droit Comprend une rotation simultanée du moteur gauche et droit, le robot avance droit (Fig. 7 Pos. 2 Valeur: 5)
- La pression simultanée des boutons inférieurs gauche et droite comprend une rotation simultanée du moteur gauche et droit, le robot recule droit (Fig. 7 Pos. 2 Valeur: 8)
- Si aucun bouton de phare n'est enfoncé - le robot s'arrête (Fig. 7 Pos. 2 Signification: 0).
Lorsque vous développez un algorithme de contrôle à distance, vous devez connaître les éléments suivants: Lorsque l'une des combinaisons de boutons grises est enfoncée - le phare infrarouge envoie en permanence le signal correspondant si les boutons sont libérés, le signal est arrêté. L'exception est un bouton gris horizontal séparé (Fig. 7 Posts 2 Valeur: 9). Ce bouton a deux états: "Au" - "Désactivé". Dans l'état ON, le phare continue d'envoyer un signal, même si vous relâchez le bouton (ce qui signale l'épidémie de la LED verte) pour éteindre l'envoi du signal dans ce mode - Appuyez à nouveau sur le bouton gris horizontal.
Nous allons procéder à la mise en œuvre du programme:
Notre algorithme de contrôle à distance prévoit 5 Options de comportement, respectivement notre bloc de programme "Changer" Il s'agira de cinq conteneurs logiciels. Prenez leur configuration.
- Par défaut, attribuez une option lorsqu'aucune touche n'est enfoncée. (Fig. 7 Pos. 2 Signification: 0). Installez le bloc logiciel dans le conteneur, éteignant les moteurs "B" et "C".
- Dans le conteneur de la possibilité d'appuyer sur le bouton supérieur gauche (Fig. 7 Pos. 2 Signification: 1) Bloc logiciel d'installation "Gros moteur"y compris le moteur "B".
- Dans le conteneur de la possibilité d'appuyer sur le bouton supérieur droit (Fig. 7 Pos. 2 Signification: 3) Bloc logiciel d'installation "Gros moteur"y compris le moteur "C".
- Dans le conteneur de la presse simultanée des boutons supérieurs gauche et droite (Fig. 7 Pos. 2 Valeur: 5)bloc logiciel d'installation "Gestion du moteur indépendant" "B" et "C" avant.
- Dans le conteneur de la pression simultanée des boutons inférieurs gauche et droite (Fig. 7 Pos. 2 Valeur: 8)bloc logiciel d'installation "Gestion du moteur indépendant"impliquant la rotation des moteurs "B" et "C" Dos.
- Positionnez notre bloc logiciel configuré "Changer" À l'intérieur du bloc de programme "Cycle".
Sur le projet proposé, essayez de créer vous-même un programme sans répandre en solution!

Figure. huit
Chargez le programme résultant dans le robot et exécutez-le pour exécuter. Essayez de contrôler le robot à l'aide d'un phare infrarouge. Avez-vous tout eu? Comprenez-vous le principe de la télécommande? Essayer de mettre en œuvre options additionelles Contrôler. Écrivez vos impressions dans les commentaires à cette leçon.
* Voulez-vous voir des vagues invisibles? Allumez le mode photographier dans votre téléphone portable et apportez l'article émetteur. console distante De la télévision à l'objectif téléphonique mobile. Appuyez sur les boutons de la télécommande et sur l'écran du téléphone, observez la lueur des ondes infrarouges.