J'ai parlé de la préhistoire de l'apparition du projet FLPROG. Maintenant, je veux parler du projet plus en détail et son état aujourd'hui.
L'objectif principal du projet est d'inclure dans le cercle des utilisateurs des personnes arduino de personnes inconnues avec la programmation. Cela est possible en raison de l'expérience de la programmation industrielle, qui a été accumulée par les années producteurs de contrôleurs industriels.
Le projet comprend deux parties. La première partie est une application de bureau FLPROG est un environnement graphique de programmation Arduino. Deuxièmement, il s'agit d'un site flprog.ru, avec l'aide de laquelle les membres des utilisateurs de la Communauté du programme peuvent communiquer entre eux, apprennent les dernières nouvelles du projet, téléchargez la dernière version du programme et trouvez les informations nécessaires sur le travail avec l'application.
Commençons par ordre.
Le programme FLPROG vous permet de créer du micrologiciel pour les cartes Arduino à l'aide de langages graphiques FBD et LOD, qui sont standard dans le domaine des contrôleurs industriels de programmation.
Description de la langue FBD.
FBD (diagramme de blocs de fonction) - Langue graphique de la CEI 61131-3 Langage de programmation. Le programme est formé à partir de la liste des chaînes effectuées séquentiellement de haut en bas. Utilisations de programmation des blocs de bibliothèque. Le bloc (élément) est un sous-programme, une fonction ou un bloc fonctionnel (et ou non des déclencheurs, des minuteries, des compteurs, des unités de traitement de signal analogiques, des opérations mathématiques, etc.). Chaque chaîne séparée est une expression composée de graphiquement à partir d'éléments individuels. Le bloc Suivant est connecté à la sortie de bloc, formant une chaîne. À l'intérieur du circuit, des blocs sont effectués strictement dans l'ordre de leur connexion. Le résultat du calcul de la chaîne est enregistré dans la variable interne ou a été introduit à la sortie du contrôleur.
Lady Description garçon.
Le diagramme à échelle (LD, garçon, RCS) est la langue de la logique de relais (escalier). La syntaxe de langue est pratique pour remplacer les systèmes de logique fabriqués sur des techniques de relais. La langue est axée sur les ingénieurs d'automatisation travaillant dans des entreprises industrielles. Fournit une interface visuelle de la logique du contrôleur, facilitant non seulement les tâches de programmation et de mise en service, mais également un dépannage rapide dans le matériel connecté au contrôleur d'équipement. Le programme dans la langue logique relais a une interface graphique qui représente des opérations logiques, en tant que circuit électrique avec des contacts fermés et ouverts, est des ingénieurs électriques visuels et intuitivement intelligents. Le flux ou le manque de courant dans cette chaîne correspond au résultat d'une opération logique (vérité - si le courant coule actuel; Faux - si le courant ne coule pas). Les principaux éléments de la langue sont des contacts pouvant être figuré comme une paire de contacts de relais ou de boutons. Une paire de contacts est identifiée avec une variable logique et l'état de cette paire - avec une valeur variable. Les éléments de contact normalement fermés et normalement ouverts pouvant être mappés avec des boutons normalement fermés et normalement ouverts des circuits électriques sont distingués.
J'ai légèrement étendu la fonctionnalité classique de ces langues en ajoutant des blocs fonctionnels responsables du travail avec des périphériques externes. Ce sont des emballages, sur des bibliothèques conçues pour travailler avec eux.
Le projet dans FLPROG est un ensemble de cartes, sur chacune d'une collecte du module de circuit solide complet. Pour plus de commodité, chaque conseil a le nom et les commentaires. De plus, tous les frais peuvent être effondrés (pour économiser de l'espace sur la zone de travail lorsque les travaux de fonctionnement sont terminés) et déployez. L'indicateur rouge au nom de la carte indique qu'il existe des erreurs dans le schéma du conseil.
Vue de la fenêtre du programme dans la langue FBD
Vue de la fenêtre du programme en mode linguistique garçon 
Le circuit de chaque carte est collecté à partir de blocs fonctionnels en fonction de la logique du contrôleur. La plupart des blocs fonctionnels ont la capacité de configurer, avec lequel leur travail peut être configuré conformément aux exigences nécessaires dans ce cas particulier.

De plus, pour chaque bloc fonctionnel, une description détaillée est disponible à tout moment et permet de comprendre son travail et ses paramètres.

Lorsque vous travaillez avec le programme, l'utilisateur n'a pas besoin d'écrire du code, de contrôler l'utilisation des entrées - sorties, la vérification du caractère unique des noms et la cohérence des types de données. Derrière tout cela surveille le programme. Il vérifie également l'exactitude du projet entièrement et indique des erreurs.
Plusieurs outils auxiliaires ont été créés pour fonctionner avec des appareils externes. Il s'agit d'un outil d'initialisation en temps réel et des paramètres du client, des outils de lecture de périphériques sur des pneus onewire et I2C ainsi que l'outil de lecture et d'enregistrement des boutons à la télécommande IR. Toutes les données spécifiques peuvent être enregistrées en tant que fichier et ensuite utilisées dans le programme.
Liste des blocs fonctionnels du courant existant dans la langue de la FBD
Éléments basiques
Blocs spéciaux
Déclencheurs
Minuteries
Compteurs
Mathématiques
Algèbre
Comparaison
Com-port.
Envoyer.Sendvariable
Recevariable.
Changer
Moteurs
SERVOMOTEUR.Moteur pas à pas
Regarder de temps réel
Affiche
Affichage sur puce nd44780Afficher l'éclairage à la puce HD44780 I2C
Cordes
Chaîne d'additionCapteurs
carte SD
Variable d'enregistrement sur la carte SDDécharger un fichier avec une carte SD
Conversion de types
Conversion de ligneConversion de flotteur en Integer
Frites d'expansion
Expander Conclusions 74HC595Opérations avec des bits
ChiffrerDécodeur
Jeu de lecture
Enregistrement de bits
miscellanea
Clavier matriceListe des blocs fonctionnels de la langue courante existante
Blocs de base
ContacterBobine
Protection contre Dresga.
Sélection du front avant
Relais spéciaux
Relais de BigelleRelayage de temps
Générateur
Comparaison du relais
Algèbre
Péché.Cos.
Bronzer.
abdos
Max
Min.
Sq.
Sqrt.
Pow
Aléatoire
Blocs analogiques
Mise à l'échelleMathématiques
Compteur
Commutateur analogique
Passer beaucoup à un
Un commutateur à plusieurs
Contrôleur d'entrée analogique
Contrôleur de sortie analogique
Conventeur analogique d'entrée
Sortie de connecteur analogique
Compteur de vitesse
COMPORT.
Transfert au comport.Transmission de la variable via la comporte
Recevoir une variable via COMPORT
Moteurs
ServomoteurMoteur à pas
Regarder de temps réel
Pour obtenir des donnéesRéveil
Temps de prise
Affiche
Afficher sur puce HD44780Afficher une unité de commande lumineuse sur la puce HD4480 I2C
Unité de décodage à sept indicateurs de segment
Cordes
Chaîne d'additionCapteurs
Vinder ultrasonique HC-SR04Capteur de température et d'humidité DHT11 (DHT21, DHT22)
Capteur de température DS18x2x
IR RESSIVE
BMP-085.
Bonjour! Je suis Alikin Alexander Sergeevich, l'enseignant d'études supplémentaires, conduit les tasses "Robotics" et "Génie radio" à Tsdutt G. Labinsk. J'aimerais parler un peu de la méthode simplifiée de programmation Arduino à l'aide du programme Ardublock.
J'ai introduit ce programme dans le processus éducatif et admira le résultat, chez les enfants qu'elle aime une demande spéciale, en particulier lors de la rédaction des programmes les plus simples ou de créer une étape initiale de programmes complexes. Ardublock est un support de programmation graphique, c'est-à-dire que toutes les actions sont effectuées avec des images dessinées avec des actions signées en russe, ce qui simplifie l'étude de la plate-forme Arduino. Les enfants de la 2e année maîtrisent facilement le travail avec Arduino grâce à ce programme.
Oui, quelqu'un peut dire qu'il reste encore rayer et c'est aussi un environnement graphique très simple pour la programmation d'Arduino. Mais Scratch ne clignote pas Arduino, mais ne les contrôle que par le câble USB. Arduino dépend de l'ordinateur et ne peut pas fonctionner de manière autonome. Lors de la création de vos propres projets, l'autonomie pour Arduino est la principale chose, en particulier lors de la création de périphériques robotiques.
Même avec tous les robots LEGO bien connus, tels que NXT ou EV3, nos étudiants ne sont plus aussi intéressants avec l'avènement des programmes de programmation Arduino. Plus d'Arduino est beaucoup moins chère que tous les designers Lego et de nombreux composants ne peuvent être pris simplement à partir de la technologie électronique ancienne des ménages. Le programme Ardublox aidera au travail non seulement les débutants, mais également aux utilisateurs actifs de la plate-forme Arduino.
Alors qu'est-ce que Ardublock? Comme je l'ai dit, il s'agit d'un environnement de programmation graphique. Presque complètement traduit en russe. Mais dans l'Ardublock, le Raisher n'est pas seulement que, mais aussi le fait que le programme Ardublock écrit par US convertit dans le code IDE Arduino. Ce programme est intégré dans l'environnement de programmation d'Arduino Ide, c'est-à-dire un plugin.
Vous trouverez ci-dessous un exemple de DEL clignotant et d'un programme converti dans l'IDE Arduino. Tout le travail avec le programme est très simple et tout écolier sera capable de le comprendre.

À la suite de travaux sur le programme, vous pouvez non seulement programmer Arduino, mais également étudier les équipes incompréhensibles pour nous dans le format de texte de l'IDE Arduino, eh bien, et si les commandes standard "paresses" écrivent - se dressent avec des manipulations rapides à l'écrémage Un programme simple à Ardubublok et à Arduino IDE pour déboguer.
Pour installer ArduBublok, vous devez d'abord télécharger et installer Arduino IDE à partir du site officiel de l'Arduino et traiter les paramètres lorsque vous travaillez avec le tableau ARDUINO UNO. Comment faire cela est décrit sur le même site ou sur AMPERE, ou voir sur les étendues de YouTube. Eh bien, et lorsque nous traitons avec tout cela, vous devez télécharger Ardublik depuis le site officiel. Je ne recommande pas les dernières versions, je ne recommande pas de télécharger, ils sont très complexes pour les débutants, mais la version de 2013-07-12 est la chose la plus populaire des plus populaires.
Ensuite, le fichier téléchargé est renommé à Ardublock-tous et dans le dossier "Documents". Créez les dossiers suivants: Arduino\u003e Outils\u003e ArdublockTool\u003e Outil et dans le dernier lancement du fichier téléchargé et renommé. Ardubublok travaille sur tous les systèmes d'exploitation, même sur Linux, vérifié personnellement sur XP, Win7, Win8, tous des exemples pour Win7. L'installation du programme pour tous les systèmes est la même.

Eh bien, et si c'est plus facile, j'ai préparé une archive 7Z sur le disque de messagerie, qui est déballée qui trouvera 2 dossiers. Dans un programme déjà de travail Arduino IDE, et dans un autre dossier, le contenu doit être envoyé dans le dossier Documents.
Afin de travailler à Ardubublok, vous devez exécuter Arduino Ide. Après cela, nous allons à l'onglet Outils et ils trouvent le point Ardubublok, cliquez dessus - et c'est ici, notre objectif.

Maintenant, traitons l'interface du programme. Comme vous l'avez déjà compris, il n'y a pas de paramètres de sécurité, mais il y a beaucoup d'icônes de programmation et chacun d'entre eux porte une commande dans le format de texte de l'IDE Arduino. Dans les nouvelles versions des icônes encore plus, afin de traiter avec l'Ardublok de la dernière version est difficile et certaines des icônes ne sont pas traduites en russe.

Dans la section "Gestion", nous trouverons une variété de cycles.

Dans la section "Ports", nous pouvons contrôler les valeurs des ports, ainsi que les soundhakers connectés à leur capteur d'approximation servo ou ultrasonore.

Dans la section "Numéros / constantes", nous pouvons choisir des valeurs numériques avec vous ou créer une variable, mais le fait qu'il est peu probable de l'utiliser.

Dans la section "Opérateurs", nous trouverons tous les opérateurs de comparaison et de calcul nécessaires.

La section "Utilitaires" utilise essentiellement des icônes avec le temps.

"Tinkerkit Bloks" est une section pour les capteurs de jeu de tikerkit achetés. Nous avons un tel ensemble, bien sûr, non, mais cela ne signifie pas que pour d'autres ensembles, les icônes ne conviendront pas, même au contraire - les gars sont très pratiques d'utiliser de telles icônes que le tournant sur le voyant ou le bouton. . Ces marques sont utilisées dans presque tous les programmes. Mais ils ont une fonctionnalité - lorsqu'ils choisissent, il y a de mauvaises icônes désignant des ports. Ils doivent donc être supprimés et remplacer l'icône de la section "Numéro / constante" du sommet de la liste.

"Robot DF" - Cette section est utilisée en présence de capteurs spécifiés, ils sont parfois trouvés. Et notre exemple d'aujourd'hui ne fait pas exception, nous avons un "commutateur IR ajustable" et "capteur de ligne". Le "capteur de ligne" est différent du fait que sur la photo, comme il vient d'AMPEKA. Leurs actions sont identiques, mais le capteur de l'ampell est bien meilleur, car il a un régulateur de sensibilité.

"SeeDstudio Grove" - \u200b\u200bLes capteurs de cette section ne sont jamais utilisés, bien que seules les joysticks. Dans les nouvelles versions, cette section est élargie.

Et la dernière section est "Kit de lieur". Les capteurs présentés en elle n'ont pas traversé.
Je veux montrer un exemple de programme sur un robot en mouvement le long de la bande. Le robot est très simple, à la fois dans l'assemblée et dans l'acquisition, mais à propos de tout dans l'ordre. Commençons par son acquisition et son assemblage.
Voici l'ensemble des détails a été acheté sur le site Web d'AMPEKA.

- Bouclier moteur AMP-B001 (2 canaux, 2 a) 1 890 frotter
- AMP-B017 Troyka Shield 1 690 frotter
- AMP-X053 Compartiment à piles 3 × 2 AA 1 60 Frotter
- Capteur de ligne numérique AMP-B018 2 580 frotter
- Rob0049 Plate-forme à deux roues Miniq 1 1890 frotter
- Obstacles du capteur infrarouge SEN0019 1 390 Frotter
- FIT0032 Fixation pour capteurs infrarouges Obstacles 1 90 roubles
- A000066 Arduino Uno 1 1150 frotter

Pour commencer, nous recueillons la plate-forme de roue et soudez les fils du fil.

Ensuite, installez les racks pour fixer le tableau Arduino ONO, qui a été extrait de l'ancienne carte mère ou d'autres attaches similaires.

Ensuite, Krepim sur ces racks de l'Arduino Uno Board, mais un boulon ne fonctionne pas - les connecteurs interfectent. Bien sûr, vous pouvez les laisser tomber, mais c'est déjà à votre discrétion.

Le prochain capteur infrarouge sécurisé des obstacles à son montage spécial. Veuillez noter que le régulateur de sensibilité est d'en haut, c'est pour la commodité de l'ajustement.


Installez maintenant les capteurs de ligne numérique, il devra rechercher un couple de boulons et 4 écrous à deux écrous définis entre la plate-forme elle-même et le capteur de ligne, et le reste fixe les capteurs.

Le protocole d'installation suivant ou autrement, vous pouvez appeler le pilote du moteur. Dans notre cas, faites attention au cavalier. Nous n'utiliserons pas de régime séparé pour les moteurs. Il est donc défini dans cette position. La partie inférieure est bloquée avec une bande, ce n'est pas une fermeture aléatoire à partir du connecteur USB Arduino Uno, c'est au cas où.


Top Motor Shield Installez Troyka Shield. Il est nécessaire que la commodité des capteurs de connexion. Tous les capteurs numériques utilisés par nous, de sorte que les capteurs de ligne sont connectés à 8 et 9 port, car ils sont également appelés goupilles, et le capteur d'obstacles infrarouge est connecté à 12 ports. Assurez-vous de noter que les ports 4, 5, 6, 7 ne peuvent pas être utilisés comme bouclier moteur permettent de contrôler les moteurs. J'ai même spécifiquement peint avec un marqueur rouge pour faire face aux élèves.

Si vous avez déjà remarqué, j'ai été ajouté par une manche noire, ceci est juste au cas où le compartiment de la batterie est installé par nous n'a pas volé. Enfin, nous fixons la conception entière par bande de caoutchouc conventionnelle.
Les connexions du compartiment de la batterie peuvent être de 2 types. La première connexion filaire à Troyka Shield. Il est également possible de tomber le bouchon d'alimentation et de se connecter à la carte Arduino Uno elle-même.


Voici notre robot prêt. Avant de commencer à programmer, il sera nécessaire d'apprendre comment tout fonctionne, à savoir:
- Moteurs:
Les ports 4 et 5 sont utilisés pour contrôler un moteur et 6 et 7 autres;
La vitesse de rotation des moteurs qui ajuste la cale sur les ports 5 et 6;
En avant ou en arrière, d'alimentation des signaux des ports 4 et 7.
- Capteurs:
Nous avons tous numérique, donnons donc des signaux logiques sous la forme de 1 ou 0;
Et que les ajuster, ils fournissent des régulateurs spéciaux et avec un tournevis approprié, ils peuvent être calibrés.
Les détails peuvent être trouvés sur l'ampère. Pourquoi? Parce qu'il y a beaucoup d'informations sur le travail avec Arduino.
Eh bien, nous sommes peut-être tous considérés superficiellement, étudiés et bien sûr ont rassemblé un robot. Maintenant, il doit être programmé, il s'agit donc d'un programme tant attendu!

Et le programme est converti en Arduino IDE:
Vide de configuration () (pince (8, entrée); Pinmode (12, entrée); Pinmode (9, entrée); Pinmode (4, sortie); Pinmode (5, sortie); Pinmode (6 , Sortie);) boucle vide () (si (DigitalRead (12)) (si (digitalRead (8)) (si (numérique (9)) (denawrite (4, haut); analogueur (5, 255); analogueur ( 6, 255); denadewrite (7, élevée);) d'autre (denawrite (4, élevée); analogueur (5, 255); analogueur (6, 50); denawrite (7, faible);)));)) (9)) (denadewrite (4, bas); analogueur (5, 50); analogueur (6, 255); denawrite (7, haut);) Autres (denawrite (4, haut); analogueur (5, 255); Analogueur (6, 255); denadewrite (7, élevée);)))) ailleurs (denawrite (4, haut); analogueur (5, 0); analogueur (6, 0); denawrite (7, haut);));
En conclusion, je tiens à dire que ce programme est juste une trouvaille pour l'éducation, même pour l'auto-étude, il vous aidera à explorer les commandes IDE Arduino. Le raisin le plus important est que plus de 50 icônes d'installation, cela commence à "bug". Oui, en effet, c'est un raisin, puisque la programmation permanente que sur Ardubublok ne vous éduquera pas la programmation à Arduino IDE. Le soi-disant "problème" permet de penser et d'essayer de mémoriser des commandes pour des programmes de débogage précis.
Je vous souhaite du succès.
Démarrer un article avec un aperçu des moyens existants de développement de programmes pour ceux qui ont été largement utilisés dans les développements professionnels et amateurs de modules de microcontrôleurArduino., l'auteur raconte en détail l'un d'entre eux -Flocrog., conçu pour les utilisateurs spécialisés dans l'ingénierie et l'électronique électrique, mais ne parlent pas de langues de programmation. Tous les programmes d'action prescrits représentent dans ce système visuel et familiarisé avec de tels spécialistes aux noticialités graphiques classiques.
L'environnement de développement officiel des modules Arduino propose des utilisateurs appelés Arduino Ide ( figure. une).
La programmation y a lieu dans la langue de traitement / câblage - dialecte de la langue (plutôt, C ++). L'environnement est en fait un éditeur de texte régulier avec la possibilité de diffuser le texte du programme dans des codes de machine et leurs téléchargements sur le microcontrôleur de module. Une alternative à l'IDE Arduino - destinée aux microcontrôleurs de la famille AVR intégré mercredi AVR Studio ( figure. 2.). Il sert à développer et à déboguer des programmes dans la langue des assembleurs, mais le compilateur C peut également être connecté à celui-ci. En 2006, il a changé le nom sur Atmel Studio.

Avec l'avènement des langages de programmation visuels, non seulement des amateurs de radio, mais également de nombreux professionnels étaient violemment commutés. Les moyens existants de développement de ce type peuvent être divisés en trois types:

FBD (diagramme de blocs de fonction) - Langue graphique de la CEI 61131-3 Langage de programmation. Le programme est une liste de chaînes remplies de la séquence de haut en bas. Formulaire de chaînes à partir de blocs de bibliothèque. Le bloc (élément) est un sous-programme, une fonction ou un bloc fonctionnel (et non déclencheur, une minuterie, un compteur, une unité de traitement de signal analogique, une opération mathématique, etc.).
Chaque chaîne est composée de blocs individuels, connectant à la sortie de la suivante sur l'écran de l'ordinateur. À l'intérieur de la chaîne, le programme effectue des blocs strictement dans l'ordre de leur connexion. Le résultat obtenu à la sortie du dernier bloc de la chaîne, le programme écrit à la variable interne ou soumet à la sortie du contrôleur. Un exemple de la vue visuelle du programme FBD est indiqué sur figure. 7..

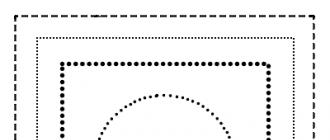
Le garçon (diagramme d'échelle) est un langage logique relais (escalier), également appelé nom de LD et RCS.
La syntaxe de cette langue est pratique pour décrire des nœuds logiques fabriqués sur des techniques de relais. La langue est axée sur les spécialistes de l'automatisation travaillant dans des entreprises industrielles. Il fournit un affichage visuel de la logique du contrôleur, facilitant non seulement la programmation et la mise en service réelles du système, mais également un dépannage rapide dans le matériel connecté au contrôleur. Le programme de la langue logique du relais a une vue d'ingénieur visuelle et intuitive, représentant des opérations logiques sous la forme de circuits électriques avec des contacts fermés et ouverts. Le flux ou l'absence de courant dans un tel circuit correspond au résultat d'une opération logique (flux de courant - vérité, courant ne coule pas). Un exemple de schéma de garçon est présenté à figure. huit.

Les principaux éléments du god sont les contacts pouvant être comme un relais ou des boutons de contact avec des paires. La paire de contacts est identifiée avec une variable logique et l'état de cette paire - avec une valeur variable. Distinguer des éléments de contact normalement fermés et normalement ouverts. Ils peuvent être mappés avec des boutons normalement fermés et normalement ouverts dans des circuits électriques.
Une telle approche était très pratique pour l'entrée facile des ingénieurs d'électricien dans le développement de systèmes d'automatisation. Travailler des projets d'installation, ils peuvent facilement les lier à fonctionner aux algorithmes de fonctionnement du contrôleur. Lors de l'entretien des installations sur l'installation, il est très important que le personnel de service puisse facilement vérifier le fonctionnement du système, trouver et éliminer le problème sans causer le programmateur du "Centre" pour chaque bagatelle. Aujourd'hui, avec l'aide de tels développements, presque tous les systèmes d'automatisation industrielle créent.
Le système de développement du programme FLPROG conçu sur ces performances fonctionne avec les modules de microcontrôleurs Arduino. Ces modules sont très pratiques pour les dispositifs de développement et de débogage rapide, ce qui est important non seulement aux amateurs radio, mais également très utile, par exemple dans les cercles scolaires et dans les laboratoires de formation. L'un des avantages n'est pas requis programmeur. Il suffit de connecter le module Arduino à l'ordinateur et de télécharger le programme préparé directement à partir de l'environnement de développement.
Actuellement, il existe une riche choix de différentes variantes de modules de microcontrôleurs Arduino ( figure. neuf), ainsi et complétez-les des modules, tels que des capteurs et des actionneurs. De plus, sur Internet (par exemple, sur le site http://robocraft.ru/) Vous pouvez trouver un grand nombre de projets finis basés sur ces modules et les adapter à vos besoins.

Actuellement, FLProg travaille actuellement avec les versions suivantes du module: Arduino Diecimila, Arduino Duemila-Nove, Arduino Leonardo, Arduino Lilypad, Arduino Mega 2560, Arduino Micro, Arduino Mini, Arduino Nano (ATMEGA168), Arduino Nano (ATMEGA328), Arduino Pro Mini, Arduino Pro (ATMEGA168), Arduino Pro (ATMEGA328), Arduino Uno. Récemment, Intel Galileo Gen2 est apparu dans la liste. À l'avenir, il est prévu de reconstituer et cette liste, éventuellement ajoutant des modules à base de microcontrôleurs STM.
Pour créer FLPROG, l'expérience de Siemens, d'ABB, de Schneider Electric et de développements dans leurs environnements de programmation a été utilisée. Dans le même temps, la fonctionnalité linguistique classique a été légèrement étendue pour travailler avec des contrôleurs industriels en ajoutant des blocs fonctionnels responsables de la collaboration avec des périphériques externes. Le programme fonctionne sur des ordinateurs exécutant Windows et Linux.
L'interface utilisateur FLPROG est conçue de manière à ce que le projet soit un ensemble de cartes virtuelles, chacun d'entre eux étant recueilli par le module terminé du système développé. Chaque conseil a le nom et est équipé de commentaires. Pour économiser de l'espace dans la zone de travail, il peut être effondré si le travail est terminé, et si nécessaire, réappliquez et apportez des ajustements.
Indicateur rouge pour le nom de la carte sur figure. dix Indique que les erreurs sont détectées dans son schéma. Après correction d'erreurs de correction, l'indicateur deviendra vert. La flèche à côté du commentaire est conçue pour une croûte de l'image.

La bonne fenêtre de l'espace de travail ( figure. Onze) Il est assigné à la bibliothèque d'éléments. Vous pouvez ajouter un composant au projet par simple glisser et double-cliquer affichera des informations sur l'élément de programme. La liste des blocs prévus dans le programme, leur description et l'aide pour travailler avec le programme se trouvent sur la page Web. Sur la page Internet, il existe une liste d'équipements périphériques pris en charge par le programme. Ces listes sont constamment réapprovisionnées.

Au fur et à mesure que le programme se développe, il est prévu d'organiser l'échange d'informations sur l'interface Bluetooth, Radio Channel et RS-485, fonctionnant avec un gyroscope à trois axes, un luxmège et d'autres capteurs. Dans les plans futurs, il existe un développement d'un système SCADA pour accéder aux systèmes conçus à l'aide de l'environnement FLPROG, à partir d'un ordinateur personnel ou d'un appareil mobile.
Le FLPROG développé par le «schéma principal» se traduit par la procédure / langage de câblage. À la fin de la compilation, Arduino IDE est automatiquement situé avec un croquis chargé du projet. Dans l'IDE Arduino, vous devez spécifier le port COM de l'ordinateur à laquelle le module de microcontrôleur est connecté, sélectionnez le type de module et téléchargez le programme sur son microcontrôleur.
L'environnement de programmation FLPROG peut être adapté aux contrôleurs logiques programmables, différant des modules Arduino, qui permettront à un logiciel russe de travailler avec eux.
LITTÉRATURE
- Création d'aide-A pour le programme FLPROG. - URL http://flprogwiki.ru/wiki/index.php?titter\u003d%D0%A1%D0%BE%D0%B7%D0%B4%D0%B0%D0%BD%D0%B8%D0%B5HELP -% DO% BO% D0% B4% D0% BB% D1% 8F_% D0% 8F% D1% 80% D0% BE% D0% B3% D1% 80% D0% B0% D0% BC% D0% BC% D1% 8BFLOGEN (23.06 15).
- Équipement applicable dans le projet. - URL
Bonjour! Je suis Alikin Alexander Sergeevich, l'enseignant d'études supplémentaires, conduit les tasses "Robotics" et "Génie radio" à Tsdutt G. Labinsk. J'aimerais parler un peu de la méthode simplifiée de programmation Arduino à l'aide du programme Ardublock.
J'ai introduit ce programme dans le processus éducatif et admira le résultat, chez les enfants qu'elle aime une demande spéciale, en particulier lors de la rédaction des programmes les plus simples ou de créer une étape initiale de programmes complexes. Ardublock est un support de programmation graphique, c'est-à-dire que toutes les actions sont effectuées avec des images dessinées avec des actions signées en russe, ce qui simplifie l'étude de la plate-forme Arduino. Les enfants de la 2e année maîtrisent facilement le travail avec Arduino grâce à ce programme.
Oui, quelqu'un peut dire qu'il reste encore rayer et c'est aussi un environnement graphique très simple pour la programmation d'Arduino. Mais Scratch ne clignote pas Arduino, mais ne les contrôle que par le câble USB. Arduino dépend de l'ordinateur et ne peut pas fonctionner de manière autonome. Lors de la création de vos propres projets, l'autonomie pour Arduino est la principale chose, en particulier lors de la création de périphériques robotiques.
Même avec tous les robots LEGO bien connus, tels que NXT ou EV3, nos étudiants ne sont plus aussi intéressants avec l'avènement des programmes de programmation Arduino. Plus d'Arduino est beaucoup moins chère que tous les designers Lego et de nombreux composants ne peuvent être pris simplement à partir de la technologie électronique ancienne des ménages. Le programme Ardublox aidera au travail non seulement les débutants, mais également aux utilisateurs actifs de la plate-forme Arduino.
Alors qu'est-ce que Ardublock? Comme je l'ai dit, il s'agit d'un environnement de programmation graphique. Presque complètement traduit en russe. Mais dans l'Ardublock, le Raisher n'est pas seulement que, mais aussi le fait que le programme Ardublock écrit par US convertit dans le code IDE Arduino. Ce programme est intégré dans l'environnement de programmation d'Arduino Ide, c'est-à-dire un plugin.
Vous trouverez ci-dessous un exemple de DEL clignotant et d'un programme converti dans l'IDE Arduino. Tout le travail avec le programme est très simple et tout écolier sera capable de le comprendre.
À la suite de travaux sur le programme, vous pouvez non seulement programmer Arduino, mais également étudier les équipes incompréhensibles pour nous dans le format de texte de l'IDE Arduino, eh bien, et si les commandes standard "paresses" écrivent - se dressent avec des manipulations rapides à l'écrémage Un programme simple à Ardubublok et à Arduino IDE pour déboguer.
Pour installer ArduBublok, vous devez d'abord télécharger et installer Arduino IDE à partir du site officiel de l'Arduino et traiter les paramètres lorsque vous travaillez avec le tableau ARDUINO UNO. Comment faire cela est décrit sur le même site ou sur AMPERE, ou voir sur les étendues de YouTube. Eh bien, et lorsque nous traitons avec tout cela, vous devez télécharger Ardublik depuis le site officiel. Je ne recommande pas les dernières versions, je ne recommande pas de télécharger, ils sont très complexes pour les débutants, mais la version de 2013-07-12 est la chose la plus populaire des plus populaires.
Ensuite, le fichier téléchargé est renommé à Ardublock-tous et dans le dossier "Documents". Créez les dossiers suivants: Arduino\u003e Outils\u003e ArdublockTool\u003e Outil et dans le dernier lancement du fichier téléchargé et renommé. Ardubublok travaille sur tous les systèmes d'exploitation, même sur Linux, vérifié personnellement sur XP, Win7, Win8, tous des exemples pour Win7. L'installation du programme pour tous les systèmes est la même.
Eh bien, et si c'est plus facile, j'ai préparé une archive 7Z sur le disque de messagerie, qui est déballée qui trouvera 2 dossiers. Dans un programme déjà de travail Arduino IDE, et dans un autre dossier, le contenu doit être envoyé dans le dossier Documents.
Afin de travailler à Ardubublok, vous devez exécuter Arduino Ide. Après cela, nous allons à l'onglet Outils et ils trouvent le point Ardubublok, cliquez dessus - et c'est ici, notre objectif.
Maintenant, traitons l'interface du programme. Comme vous l'avez déjà compris, il n'y a pas de paramètres de sécurité, mais il y a beaucoup d'icônes de programmation et chacun d'entre eux porte une commande dans le format de texte de l'IDE Arduino. Dans les nouvelles versions des icônes encore plus, afin de traiter avec l'Ardublok de la dernière version est difficile et certaines des icônes ne sont pas traduites en russe.
Dans la section "Gestion", nous trouverons une variété de cycles.
Dans la section "Ports", nous pouvons contrôler les valeurs des ports, ainsi que les soundhakers connectés à leur capteur d'approximation servo ou ultrasonore.
Dans la section "Numéros / constantes", nous pouvons choisir des valeurs numériques avec vous ou créer une variable, mais le fait qu'il est peu probable de l'utiliser.
Dans la section "Opérateurs", nous trouverons tous les opérateurs de comparaison et de calcul nécessaires.
La section "Utilitaires" utilise essentiellement des icônes avec le temps.
"Tinkerkit Bloks" est une section pour les capteurs de jeu de tikerkit achetés. Nous avons un tel ensemble, bien sûr, non, mais cela ne signifie pas que pour d'autres ensembles, les icônes ne conviendront pas, même au contraire - les gars sont très pratiques d'utiliser de telles icônes que le tournant sur le voyant ou le bouton. . Ces marques sont utilisées dans presque tous les programmes. Mais ils ont une fonctionnalité - lorsqu'ils choisissent, il y a de mauvaises icônes désignant des ports. Ils doivent donc être supprimés et remplacer l'icône de la section "Numéro / constante" du sommet de la liste.
"Robot DF" - Cette section est utilisée en présence de capteurs spécifiés, ils sont parfois trouvés. Et notre exemple d'aujourd'hui ne fait pas exception, nous avons un "commutateur IR ajustable" et "capteur de ligne". Le "capteur de ligne" est différent du fait que sur la photo, comme il vient d'AMPEKA. Leurs actions sont identiques, mais le capteur de l'ampell est bien meilleur, car il a un régulateur de sensibilité.
"SeeDstudio Grove" - \u200b\u200bLes capteurs de cette section ne sont jamais utilisés, bien que seules les joysticks. Dans les nouvelles versions, cette section est élargie.
Et la dernière section est "Kit de lieur". Les capteurs présentés en elle n'ont pas traversé.
Je veux montrer un exemple de programme sur un robot en mouvement le long de la bande. Le robot est très simple, à la fois dans l'assemblée et dans l'acquisition, mais à propos de tout dans l'ordre. Commençons par son acquisition et son assemblage.
Voici l'ensemble des détails a été acheté sur le site Web d'AMPEKA.
- Bouclier moteur AMP-B001 (2 canaux, 2 a) 1 890 frotter
- AMP-B017 Troyka Shield 1 690 frotter
- AMP-X053 Compartiment à piles 3 × 2 AA 1 60 Frotter
- Capteur de ligne numérique AMP-B018 2 580 frotter
- Rob0049 Plate-forme à deux roues Miniq 1 1890 frotter
- Obstacles du capteur infrarouge SEN0019 1 390 Frotter
- FIT0032 Fixation pour capteurs infrarouges Obstacles 1 90 roubles
- A000066 Arduino Uno 1 1150 frotter
Pour commencer, nous recueillons la plate-forme de roue et soudez les fils du fil.
Ensuite, installez les racks pour fixer le tableau Arduino ONO, qui a été extrait de l'ancienne carte mère ou d'autres attaches similaires.
Ensuite, Krepim sur ces racks de l'Arduino Uno Board, mais un boulon ne fonctionne pas - les connecteurs interfectent. Bien sûr, vous pouvez les laisser tomber, mais c'est déjà à votre discrétion.
Le prochain capteur infrarouge sécurisé des obstacles à son montage spécial. Veuillez noter que le régulateur de sensibilité est d'en haut, c'est pour la commodité de l'ajustement.
Installez maintenant les capteurs de ligne numérique, il devra rechercher un couple de boulons et 4 écrous à deux écrous définis entre la plate-forme elle-même et le capteur de ligne, et le reste fixe les capteurs.
Le protocole d'installation suivant ou autrement, vous pouvez appeler le pilote du moteur. Dans notre cas, faites attention au cavalier. Nous n'utiliserons pas de régime séparé pour les moteurs. Il est donc défini dans cette position. La partie inférieure est bloquée avec une bande, ce n'est pas une fermeture aléatoire à partir du connecteur USB Arduino Uno, c'est au cas où.
Top Motor Shield Installez Troyka Shield. Il est nécessaire que la commodité des capteurs de connexion. Tous les capteurs numériques utilisés par nous, de sorte que les capteurs de ligne sont connectés à 8 et 9 port, car ils sont également appelés goupilles, et le capteur d'obstacles infrarouge est connecté à 12 ports. Assurez-vous de noter que les ports 4, 5, 6, 7 ne peuvent pas être utilisés comme bouclier moteur permettent de contrôler les moteurs. J'ai même spécifiquement peint avec un marqueur rouge pour faire face aux élèves.
Si vous avez déjà remarqué, j'ai été ajouté par une manche noire, ceci est juste au cas où le compartiment de la batterie est installé par nous n'a pas volé. Enfin, nous fixons la conception entière par bande de caoutchouc conventionnelle.
Les connexions du compartiment de la batterie peuvent être de 2 types. La première connexion filaire à Troyka Shield. Il est également possible de tomber le bouchon d'alimentation et de se connecter à la carte Arduino Uno elle-même.
Voici notre robot prêt. Avant de commencer à programmer, il sera nécessaire d'apprendre comment tout fonctionne, à savoir:
- Moteurs:
Les ports 4 et 5 sont utilisés pour contrôler un moteur et 6 et 7 autres;
La vitesse de rotation des moteurs qui ajuste la cale sur les ports 5 et 6;
En avant ou en arrière, d'alimentation des signaux des ports 4 et 7.
- Capteurs:
Nous avons tous numérique, donnons donc des signaux logiques sous la forme de 1 ou 0;
Et que les ajuster, ils fournissent des régulateurs spéciaux et avec un tournevis approprié, ils peuvent être calibrés.
Les détails peuvent être trouvés sur l'ampère. Pourquoi? Parce qu'il y a beaucoup d'informations sur le travail avec Arduino.
Eh bien, nous sommes peut-être tous considérés superficiellement, étudiés et bien sûr ont rassemblé un robot. Maintenant, il doit être programmé, il s'agit donc d'un programme tant attendu!
Et le programme est converti en Arduino IDE:
Vide de configuration () (pince (8, entrée); Pinmode (12, entrée); Pinmode (9, entrée); Pinmode (4, sortie); Pinmode (5, sortie); Pinmode (6 , Sortie);) boucle vide () (si (DigitalRead (12)) (si (digitalRead (8)) (si (numérique (9)) (denawrite (4, haut); analogueur (5, 255); analogueur ( 6, 255); denadewrite (7, élevée);) d'autre (denawrite (4, élevée); analogueur (5, 255); analogueur (6, 50); denawrite (7, faible);)));)) (9)) (denadewrite (4, bas); analogueur (5, 50); analogueur (6, 255); denawrite (7, haut);) Autres (denawrite (4, haut); analogueur (5, 255); Analogueur (6, 255); denadewrite (7, élevée);)))) ailleurs (denawrite (4, haut); analogueur (5, 0); analogueur (6, 0); denawrite (7, haut);));
En conclusion, je tiens à dire que ce programme est juste une trouvaille pour l'éducation, même pour l'auto-étude, il vous aidera à explorer les commandes IDE Arduino. Le raisin le plus important est que plus de 50 icônes d'installation, cela commence à "bug". Oui, en effet, c'est un raisin, puisque la programmation permanente que sur Ardubublok ne vous éduquera pas la programmation à Arduino IDE. Le soi-disant "problème" permet de penser et d'essayer de mémoriser des commandes pour des programmes de débogage précis.
Je vous souhaite du succès.
Ce blog est consacré à ce projet et je parlerai ici des nouvelles du projet et des réalisations des participants aux utilisateurs du programme du programme. Le projet est consacré à la création d'un environnement de programmation Visual Arduino, et donc avant de parler de programme FLPROG, je souhaite faire un faible aperçu des programmes existants destinés à la programmation de ces conseils.
Les environnements de programmation des cartes Arduino peuvent être divisés en types suivants:
- Emballé "Notepads"
- Environnements de développement de texte
- Structure de code de visualisation des supports graphiques.
- Les environnements graphiques affichant le code sous forme de graphiques.
- Environnements de programmation visuels qui n'utilisent pas de code.
Emballé "Notepads"
Ce type comprend l'environnement de programmation d'Arduino-IDE d'origine, ainsi que de nombreux clones.
La conception du programme pour le contrôleur a lieu dans la langue de traitement / câblage, qui est une dialecte de langue SI (plutôt que C ++). Cet environnement est en fait un éditeur de texte régulier avec la possibilité de télécharger le code écrit sur le contrôleur.
Environnements de développement de texte
Une alternative à Arduino IDE est l'environnement de développement du fabricant de microcontrôleurs Atmel-Avrstudio.

La programmation est effectuée sur Pure C, et elle a déjà beaucoup plus d'opportunités et davantage comme une IDE sérieuse pour les langages de programmation «réels».
Ces deux types de programmes sont conçus pour les programmeurs expérimentés qui connaissent bien la langue et peuvent créer des projets sérieux à l'aide d'eux.
Structure de code de visualisation des supports graphiques.
Ce sont des programmes essentiellement une extension du formatage d'un éditeur de texte de code classique. Dans ce document, le programme est également écrit dans la langue, mais dans une version plus pratique. Maintenant, il y a beaucoup d'environnements tels que les exemples les plus vivants: Scratch, S4a, Ardublock. Ils conviennent très bien à la formation initiale dans la programmation linguistique, car la structure et la syntaxe montrent excellente. Mais pour de grands projets sérieux, le programme est lourd.

Média graphique Affichage du code sous forme de graphique
Ce sont des programmes qui masquent le code et le remplaçant par des homologues graphiques. Ils répètent également la structure de la langue, des cycles, des transitions, des conditions sont formées. Il convient également très bien aux algorithmes de formation, suivis de la transition vers la programmation dans les langues classiques. Et la même chose ne convient pas à la construction de grands projets en raison de l'encombrant de l'affichage affiché. Exemple d'un tel programme: Miniblog, Builder Algorithm, FlowCode

Les types de programmes décrits ci-dessus sont conçus pour les programmeurs ou ceux qui ont décidé d'apprendre une programmation classique. Mais pour la fabrication du dispositif final, en plus de programmer directement le contrôleur, il est généralement nécessaire de développer un cercle externe de la carte, le développement et le calcul de la partie de puissance, des jonctions d'entrée et de nombreux autres. Les programmeurs ont souvent des problèmes. Mais avec cela, les électriciens et les ouvriers électroniques sont parfaits. Mais parmi eux se trouvent peu de programmeurs qui pourraient faire un programme pour le contrôleur. La combinaison d'un programmeur et d'un courrier électronique est un cas rare. À la suite d'une telle situation de projets réels, achevés sur la base des conseils d'Arduino (et d'autres contrôleurs), des unités. Pour résoudre ce problème et servir les programmes du dernier type.
Environnements de programmation visuels qui n'utilisent pas de code.
Ces programmes mettent en œuvre le principe qui a été appliqué par presque tous les fabricants de contrôleurs industriels pendant de nombreuses années. Il consiste à créer des programmes pour le contrôleur dans les langues FBD ou Laure. En fait, en tant que telles langues, elles ne le sont pas. C'est un média plutôt graphique pour dessiner des circuits fondamentaux ou logiques. Rappelez-vous que les processeurs n'étaient pas toujours des microprocesseurs, mais ont été créés sur la base de la puce numérique. Par conséquent, ceux qui sont utilisés pour travailler avec la technologie numérique, ressembleront le plus au travail sur eux que de rédiger le code dans les langages de programmation classique. Un exemple de tels programmes est Horizont et FLPROG Projets. Les programmes de ce type sont bien adaptés à l'étude de la construction d'équipements d'impulsion et de relais et de créer des projets sérieux.

Eh bien, enfin, le héros de ce blog, le projet FLPROG.
Étant donné que je travaille pour un développeur de systèmes ASUTP pendant de nombreuses années, j'ai essayé de tout assembler dans le programme FLProg Tout ce que j'ai le plus aimé dans des environnements de fabricants de fabricants industriels (TIA-Portal, Zelio Soft, logo Soft Comfort).
Le programme vous permet d'établir des diagrammes en deux types: schémas fonctionnels (FBD) et systèmes de relais (garçon).

FBD (diagramme de blocs de fonction) - Langue graphique de la CEI 61131-3 Langage de programmation. Le programme est formé à partir de la liste des chaînes effectuées séquentiellement de haut en bas. Utilisations de programmation des blocs de bibliothèque. Le bloc (élément) est un sous-programme, une fonction ou un bloc fonctionnel (et ou non des déclencheurs, des minuteries, des compteurs, des unités de traitement de signal analogiques, des opérations mathématiques, etc.). Chaque chaîne séparée est une expression composée de graphiquement à partir d'éléments individuels. Le bloc Suivant est connecté à la sortie de bloc, formant une chaîne. À l'intérieur du circuit, des blocs sont effectués strictement dans l'ordre de leur connexion. Le résultat du calcul de la chaîne est enregistré dans la variable interne ou a été introduit à la sortie du contrôleur.

Le diagramme à échelle (LD, garçon, RCS) est la langue de la logique de relais (escalier). La syntaxe de langue est pratique pour remplacer les systèmes de logique fabriqués sur des techniques de relais. La langue est axée sur les spécialistes de l'automatisation travaillant dans des entreprises industrielles. Fournit une interface visuelle de la logique du contrôleur, facilitant non seulement les tâches de programmation et de mise en service, mais également un dépannage rapide dans le matériel connecté au contrôleur d'équipement. Le programme dans la langue logique relais a une interface graphique qui représente des opérations logiques, en tant que circuit électrique avec des contacts fermés et ouverts, est des ingénieurs électriques visuels et intuitivement intelligents. Le flux ou le manque de courant dans cette chaîne correspond au résultat d'une opération logique (vérité - si le courant coule actuel; Faux - si le courant ne coule pas). Les principaux éléments de la langue sont des contacts pouvant être figuré comme une paire de contacts de relais ou de boutons. Une paire de contacts est identifiée avec une variable logique et l'état de cette paire - avec une valeur variable. Les éléments de contact normalement fermés et normalement ouverts pouvant être mappés avec des boutons normalement fermés et normalement ouverts des circuits électriques sont distingués.
Une telle méthode de programmation était très pratique pour une entrée facile dans le développement d'ingénieurs électriciens et de systèmes électroniques. Développer des projets d'appareils, ils peuvent facilement lier le travail de ces installations aux algorithmes de fonctionnement du contrôleur.
Le programme FLPROG conçu sur ces performances fonctionne avec Arduino. Pourquoi?
Le conseil d'administration est très pratique pour développer et déboguer rapidement ses appareils, ce qui est important non seulement aux amateurs radio, mais très utile, par exemple dans les cercles scolaires et dans les laboratoires de formation des collèges. Un des avantages - vous n'avez pas besoin d'un programmeur. Vous connectez le tableau Arduino à l'ordinateur et le téléchargement de programme fini de l'environnement de développement. Actuellement, il existe une riche sélection de modules Arduino, des modules supplémentaires fonctionnant avec Arduino, capteurs et appareils d'exécution.
Le programme est actuellement soutenu par les versions suivantes de Arduino: Arduino Diecimila, Arduino Duemilanove, Arduino Leonardo, Arduino Lilypad, Arduino Mega 2560, Arduino Mini, Arduino Nano (ATDUINO NANO (ATMEGA168), Arduino Nano (ATMEGA328), Arduino Pro Mini, Arduino Pro (ATMEGA168), Arduino Pro (ATMEGA328), Arduino Uno. De plus, l'Intel Galileo Gen2 est apparu dans la liste des contrôleurs pris en charge. À l'avenir, il est censé reconstituer et cette liste, et éventuellement ajouter des panneaux basés sur des contrôleurs STM.

Le projet dans le programme FLPROG est un ensemble de conseils particuliers, dont chacun est collecté par le module de régime général terminé. Pour plus de commodité, chaque conseil a le nom et les commentaires. De plus, chaque redevance peut être effondré (pour économiser de l'espace dans la zone de travail lors de son utilisation terminée) et de déployer.
La composition de la bibliothèque d'éléments pour la langue de la FBD est actuellement.
Inscription
- Une inscription
- Photo
- Table des états
- Envoi à UART.
- Réception de UART.
- Envoi d'une variable à UART
- Réception de la variable de UART
- SERVOMOTEUR.
- Moteur pas à pas
- Affichage sur puce nd44780
- Afficher l'éclairage à la puce HD44780 I2C
- Chaîne d'addition
- Comparaison de la chaîne
- Longue chaîne
- Substraille de recherche
- Obtenir la sous-chaîne
- Obtenez un symbole de la chaîne
- Ajouter Char à Row
- Enregistrement d'un élément dans un tableau
- Obtention d'un élément de tableau
- La somme des éléments du tableau
- Élément de recherche dans le tableau
- Décharger un fichier avec une carte SD
- Variable d'enregistrement sur la carte SD
- Conversion de ligne
- -\u003e octet
- -\u003e Char.
- Expander Conclusions 74HC595
- Max7219 LED Driver
- Décodeur
- Chiffrer
- Jeu de lecture
- Enregistrement de bits
- Clavier matrice
- Président Piézo
- Numérisation du pneu eleware
- Enregistrement en EEPROM.
- Lire de l'EEPROM.
- RessveVariableFromCommunication
- Websserverpage.
- SendVariaLcommunication
- Webclient.
- narodmon.ru.
- goopleplatform.com.
La composition de la bibliothèque d'éléments pour la langue de gons est actuellement.
Inscription
- Une inscription
- Photo
- Contacter
- Bobine
- Protection contre Dresga.
- Sélection du front avant
- Table des états
- Relais de Bigelle
- Relayage de temps
- Générateur
- Comparaison du relais
- Aléatoire
- Mise à l'échelle
- Mathématiques
- Compteur
- Commutateur analogique
- Passer beaucoup à un
- Un commutateur à plusieurs
- Contrôleur d'entrée analogique
- Contrôleur de sortie analogique
- Conventeur analogique d'entrée
- Sortie du conjurtant analogique
- Compteur de vitesse
- Envoi à UART.
- Réception de UART.
- Envoi d'une variable à UART
- Réception de la variable de UART
- Servomoteur
- Moteur à pas
- Pour obtenir des données
- Réveil
- Temps de prise
- Afficher sur puce HD44780
- Afficher une unité de commande lumineuse sur la puce HD4480 I2C
- Unité de décodage SemiSegment
- Chaîne d'addition
- Comparaison de la chaîne
- Longue chaîne
- Substraille de recherche
- Obtenir la sous-chaîne
- Obtenez un symbole de la chaîne
- Ajouter Char à Row
- Enregistrement d'un élément dans un tableau
- Obtention d'un élément de tableau
- La somme des éléments du tableau
- Élément de recherche dans le tableau
- Gamme ultracellulaire HC-SR04
- Capteur de température et d'humidité DHT11 (DHT21, DHT22)
- Capteur de température DS18x2x
- IR RESSIVE
- BMP-085.
- Compteur de lumière BH1750
- Variable d'enregistrement sur la carte SD
- Décharger un fichier avec une carte SD
- Conversion de ligne
- Conversion de flotteur en Integer
- -\u003e octet
- -\u003e Char.
- Expander Conclusions 74HC595
- Max7219 LED Driver
- Chiffrer
- Décodeur
- Jeu de lecture
- Enregistrement de bits
- Clavier matrice
- Président Piézo
- Numérisation du pneu eleware
- Enregistrement en EEPROM.
- Lire de l'EEPROM.
- Envoi d'une variable via des communications
- Recevoir une variable par les communications
- Page serveur Web
- Client
- Transfert de données à Narodmon.ru
- Télécommande Remotexy
De plus en détail sur le projet, je vais dire dans des messages suivants et enfin une petite vidéo montrant les principes de travail dans le programme et la possibilité de contrôler la carte à partir de l'application sur le smartphone.
Vous pouvez aider et traduire de l'argent sur le développement du site.