Vous ne savez pas comment configurer ou optimiser le radar dans CS GO ? Dans ce fil, nous allons simplement jeter un œil aux paramètres du radar dans CS Global Offensive. Que faut-il pour installer un radar ? Tout se fait très simplement, vous n'avez pas besoin de télécharger de logiciel supplémentaire, il vous suffit de :
Allumer la console
Si vous rencontrez des problèmes pour ouvrir la console, suivez les instructions ci-dessous :
- Lancer CS : GO ;
- Paramètres → Paramètres de jeu;
- Activer la console développeur -> Oui;
- Paramètres → Clavier souris;
- Faites défiler vers le bas et vous verrez "Open Console" s'allumer " ` "- vous pouvez définir n'importe laquelle de vos propres clés.
Vous pouvez maintenant commencer la configuration !
Mise en place du radar
La première chose que je vous conseillerais est de créer un jeu avec des bots pour qu'ils ne puissent pas vous tuer et, déjà dans le jeu, s'occuper de la mise en place du radar. Commençons:
Activer/désactiver le radar
À allumer radar, vous devez écrire la commande drawradar dans la console ;
Afin de cacher radar, la commande console hideradar est utilisée ;
cl_hud_radar_scale
Cette commande est responsable de la taille du radar sur votre écran.
 |
|
| cl_hud_radar_scale "0.8" | cl_hud_radar_scale "1.3" |
| Minimum : "0.8" // Maximum : "1.3" | |
cl_radar_always_centered
Le joueur est toujours au centre du radar. À première vue, il peut sembler qu'il n'y ait pas beaucoup de différence, mais le plus est évident - lorsque vous êtes dans le coin de la carte - vous avez une meilleure vue du terrain sur le radar que si vous étiez au centre de la radar.
 |
 |
| cl_radar_always_centered "0" | cl_radar_always_centered "1" |
| Il y a deux variables disponibles pour la sélection, soit 0 ou 1 | |
cl_radar_icon_scale_min
Cette commande redimensionne les différentes icônes sur votre radar.
| cl_radar_icon_scale_min "0.4" | cl_radar_icon_scale_min "1.0" |
| Minimum : "0.4" // Maximum : "1.0" | |
cl_radar_rotate
Active et désactive la rotation du radar. Celles. si désactivé, la carte sur le radar sera toujours dans la même position.
 |
 |
| cl_radar_rotate "0" | cl_radar_rotate "1" |
| Peut être réglé sur 0 ou 1 | |
cl_radar_scale
On change l'échelle de la carte affichée sur le radar.
 |
 |
| cl_radar_scale "0.25" | cl_radar_scale "1.0" |
| Minimum : "0.25" // Maximum : "1.0" | |
cl_hud_bomb_under_radar
Cette commande active ou désactive l'affichage de l'icône de la bombe lorsque vous la portez, ou lorsque vous ne l'avez pas.
Redimensionnement dynamique du radar
Il y a des moments où l'échelle de la carte sur le radar doit être augmentée ou vice versa, réduite. Cela peut être fait en utilisant le lien ci-dessous:
Bind "KP_plus" "incrementvar cl_radar_scale 0.25 1.0 0.05" ; // augmente la taille de la liaison radar "KP_minus" "incrementvar cl_radar_scale 0.25 1.0 -0.05" ; // réduire la taille du radar
Cette liaison permet au bouton + ou - dynamiquement redimensionner le radar lorsque vous appuyez. Les boutons peuvent être quelconques à votre discrétion.
Paramètres radar standard
cl_hud_radar_scale "1" ; cl_radar_always_centered "1" ; cl_radar_icon_scale_min "0.6" ; cl_radar_rotate "1" ; cl_radar_scale "0.7" ; cl_hud_bomb_under_radar "1" ;La Fondation anti-corruption d'Alexei Navalny a réussi à découvrir que l'avion est utilisé par un fonctionnaire non seulement pour des vols vers des réunions d'affaires, mais aussi pour emmener ses chiens à diverses expositions et compétitions internationales. Cependant, la joie de la société civile sur les perspectives qui s'ouvraient devant elle pour identifier les serviteurs des personnes vivant au-dessus de leurs moyens fut de courte durée - les services mentionnés ci-dessus ont coupé la possibilité de surveiller les vols du vice-premier ministre et de ses chiens , et ils ont ignoré toutes les questions sur la légalité d'une telle décision.
Que faire?
Si les services de suivi des vols commerciaux se rangent du côté de l'État et refusent de publier des informations sur les aéronefs appartenant à des fonctionnaires, nous, les citoyens, pouvons obtenir ces données nous-mêmes. En dépensant environ quatre mille roubles pour l'équipement et quelques jours de temps libre pour l'assemblage et l'installation, tout le monde peut participer au projet de suivi indépendant des véhicules aériens - ADSBexchange.com.
Comment ça fonctionne?
Chaque avion moderne est équipé d'un transpondeur dit ADS-B - un appareil qui transmet des informations sur lui-même à une certaine fréquence en réponse à une demande d'une station radar (radar) - un identifiant unique de l'avion, ainsi que des données sur l'emplacement, la vitesse de vol et quelques autres. L'important ici est que n'importe qui peut accepter et décoder ces informations en utilisant un équipement ménager bon marché disponible gratuitement - un récepteur de télévision numérique USB de la norme DVB-T, connecté à un ordinateur monocarte Raspberry Pi avec un programme de décodeur en cours d'exécution.
Les informations décodées sur les aéronefs dans la ligne de mire du récepteur peuvent être visualisées localement, mais pour suivre l'itinéraire complet de l'aéronef du point de départ à la destination, il est nécessaire de combiner les informations reçues des récepteurs à tous les points intermédiaires . C'est exactement pour cela que le service ADSBexchange.com est conçu, en créant une carte mondiale des vols - Global Radar View sur la base des données reçues des stations de réception locales - qui est fonctionnellement similaire à celle de services tels que PlaneFinder.net et FlightRadar24. com, mais, contrairement à eux, ne cache aucune information sur les avions suivis aux utilisateurs finaux. Par exemple, nous pouvons voir que pendant les vacances du Nouvel An, le vice-Premier ministre s'est à nouveau envolé pour sa datcha en Autriche :

Plus il y a de stations de réception connectées au service, plus la couverture est complète, et dans le cas de la Russie, la situation est toujours très triste - il suffit de regarder la carte et de comparer le nombre de stations que nous avons avec le nombre de stations en Europe .

Mais il est en notre pouvoir de changer la situation actuelle ! Pour ce faire, il vous suffit de construire votre propre station de réception et de l'inclure dans le réseau ADSBexchange.
Que faut-il pour cela ?
1. Framboise Pi
Le micro-ordinateur monocarte le plus populaire au monde, il existe plusieurs modèles qui diffèrent par la taille de la mémoire, la fréquence du processeur et un ensemble de périphériques. Pour nos besoins, tout modèle avec un port Ethernet intégré convient, par exemple, Raspberry Pi 3 Model B :

Vous pouvez l'acheter avec l'alimentation et le boîtier sur Aliexpress pour environ 3000 roubles, par exemple. Vous pouvez également rechercher des vendeurs nationaux, mais le prix, bien sûr, sera nettement plus élevé.
2. Carte mémoire
Le Raspberry Pi 3 nécessite une carte microSD, les modèles précédents utilisent une carte SD pleine taille. Volume recommandé - 8 Go, classe de vitesse - 10. De fabricants de confiance, je peux recommander les cartes SanDisk ou Transcend. Le prix de l'émission est d'environ 300 roubles.
3. Récepteur USB DVB-T

Les mots-clés pour la recherche sur Aliexpress sont "RTL2832U R820T2", le prix est d'environ 500 roubles, par exemple, comme celui-ci. Vous pouvez regarder les vendeurs locaux, mais un récepteur qui a exactement le même aspect peut s'avérer être construit sur d'autres puces, vous devez donc vérifier auprès du vendeur que le bundle RTL2832U + R820T2 est à l'intérieur.
4. Antenne
Une antenne est incluse avec le récepteur USB, mais elle est, pour le moins, mal adaptée pour recevoir les signaux des transpondeurs d'avions, donc la portée de réception avec elle sera petite - au moins plusieurs dizaines de kilomètres. Afin d'obtenir un rayon de plusieurs centaines de kilomètres, il faudra le remplacer par un plus adapté. L'option la plus simple consiste à remplacer la broche d'antenne standard par une antenne colinéaire à trois éléments, qui peut être pliée à partir de fil de cuivre ou d'acier selon le dessin suivant (cliquable) :

Vous devriez vous retrouver avec quelque chose comme ceci :

La meilleure option, offrant une portée de réception maximale de 400 km, est d'utiliser une antenne colinéaire coaxiale.
Étant donné que la réception des signaux radio des transpondeurs d'avion n'est possible que dans la ligne de mire, l'antenne doit être placée à l'extérieur, idéalement sur le toit. Pour ce faire, vous pouvez utiliser soit une rallonge USB jusqu'à 5 mètres de long, en plaçant uniquement le récepteur dans un boîtier scellé, soit du PoE (dans ce cas, vous devrez également placer le Raspberry Pi dans le boîtier).
5. Doux
ADSBexchange utilise actuellement une distribution PiAware modifiée. Cette distribution a été développée par FlightAware, qui fournit également un service de suivi d'avions commerciaux, mais, hélas, dans sa forme originale, elle cache également des informations sur les jets privés. Cette distribution est prise comme base pour ADSBexchange, car elle est très facile à installer et à configurer.
Instructions pas à pas pour Windows :
- Téléchargez la distribution https://www.adsbexchange.com/downloads/ADSBexchange-img-1.2.zip (868 Mo) et enregistrez-la sur votre ordinateur.
- Décompressez le fichier ADSBexchange-img-1.2.zip.
- Téléchargez l'utilitaire Win32DiskImager et exécutez-le en tant qu'administrateur (pour ce faire, faites un clic droit sur le fichier et sélectionnez "Exécuter en tant qu'administrateur").
- Sélectionnez le fichier ADSBexchange-img-1.2.img.
- Insérez la carte SD dans le lecteur de carte de votre ordinateur.
- Sélectionnez une lettre de carte SD dans la liste correspondante.
- Cliquez sur « graver » et attendez que cela se termine pendant quelques minutes.
- Lorsque vous avez terminé, retirez la carte mémoire du lecteur de carte et insérez-la dans le Raspberry Pi.
- Connectez tous les câbles (alimentation USB, câble Ethernet, récepteur USB) au Raspberry Pi. Dans ce cas, sur le Raspberry Pi, la LED rouge doit être allumée et la LED verte doit clignoter, et à proximité du connecteur réseau Ethernet - vert et jaune.
- Attendez quelques minutes que le Raspberry Pi démarre.
- Enregistrez un nouveau compte sur le site Web FlightAware.
- Liez le destinataire au compte créé.
- Dans les paramètres du récepteur (onglet "Mon ADS-B"), modifiez les coordonnées de l'emplacement du récepteur et la hauteur de l'antenne au-dessus du niveau du sol.
- Après un certain temps, le récepteur devrait apparaître sur la carte de couverture https://www.adsbexchange.com/active-feeds/.
- L'avion actuellement suivi par votre station de réception peut être consulté en suivant le lien « Interface Web : afficher les données en direct » dans l'onglet « Mon ADS-B » sur le site Web FlightAware.
PROFIT!
Désormais, votre récepteur participe à deux réseaux de suivi des vols à la fois - ADSBexchange et, en prime, FlightAware. Distribuez cette instruction, aidez les autres à construire leurs stations de réception, et le vol de chiens de Shuvalov ne pourra pas se cacher de l'œil omniscient de la société civile !
SCHÉMA ANTI-RADAR
Probablement chaque conducteur a eu au moins une fois une idée à acquérirantiradar, surtout après le prochain racket de la police de la circulation sur la route. Alors mettez-vous au travail ! Mais précisons tout de suite :antiradar est un appareil accablantradar de police, et son assemblage est une tâche très difficile. Ici, nous allons considérer un système anti-radar plus simple - le soi-disantradar - un détecteur qui signale qu'un inspecteur scanne votre voiture.
Pour mesurer la vitesse d'une voiture, le radar de la police de la circulation reçoit le rayonnement réfléchi par la voiture et le détecteur de radar - direct, donc le détecteur de radar est toujours capable de détecter le radar plus tôt qu'il ne mesure la vitesse de la voiture ! Ainsi, si un agent de la circulation scanne depuis son radar à 500 m de la voiture, c'est la portée de l'appareil Vizir, alors avant que la voiture ne s'approche d'une distance visible de 100 m vous avez la possibilité de ralentir.
Ce circuit anti-radar est assez courant sur le réseau, et bien que je ne l'aie pas récupéré personnellement, j'ai dû réparer un tel appareil fait maison. Là, une diode micro-ondes - le détecteur se tenait dans un petit entonnoir en étain et toute la structure s'insérait dans un corps soudé à partir d'une feuille de PCB, de la taille d'un paquet de cigarettes. Sous irradiation micro-ondes, il a clignoté et a culminé. Voici une autre version du circuit anti-radar du magazine Radio:

Tous les radars en service auprès de la police de la circulation fonctionnent aux fréquences de 10525 MHz, 24150 MHz et 34700 MHz. Ces détecteurs de radar sont capables de tous les détecter.
Personnalisation circuits anti-radarpeut être exécuté en se tenant près d'une personne avec un radar ;

Ou pour ne pas s'allumer, près du radar fixe - caméra :

Parfois, ils sont placés à quelques kilomètres devant le poste de police de la circulation :

Récemment, ce qui suit a été adopté par les autorités : Le compteur de vitesse d'enregistrement vidéo radar VIZIR se compose de deux unités indépendantes - un compteur de vitesse et une caméra photo et vidéo numérique. La caméra s'allume à la fois automatiquement lorsque la voiture qui conduit dépasse la limite de vitesse prédéfinie et manuellement - par un inspecteur automatique. Caméras de surveillance avec radar intégré. L'appareil fonctionne en permanence, et lorsque la vitesse est dépassée, le capteur est activé, ce qui active la caméra.
Lecture 5 min. Vues 3,9k.
La circulation sur les routes modernes est contrôlée par des radars électroniques de la police de la circulation - des caméras vidéo, qui identifient les contrevenants dans l'ensemble du flux de circulation. Dans les pays européens, ils sont depuis longtemps habitués au fait que le trafic est constamment surveillé.
En Russie, la pratique du contrôle du trafic avec des caméras n'en est qu'à un stade de développement, mais elle rencontre déjà la résistance des « artisans » qui utilisent les brouilleurs de caméras. Un produit industriel possédant de telles propriétés est appelé détecteur de radar actif.
Le but
Un antiradar actif (brouilleur) est un appareil qui, en raison de l'émission d'un signal fort, déforme et supprime les signaux de balayage du radar. La fréquence à laquelle fonctionne l'antiradar actif est interdite à l'usage des particuliers.
Les détecteurs radar peuvent être de 2 types ; leur conception et leur principe de fonctionnement dépendent principalement du détecteur, qui peut brouiller le signal dans la plage radio ou laser. Il convient de garder à l'esprit que les anti-radars laser ne peuvent pas supprimer les signaux radio.
Principe d'opération
Le radar actif fonctionne sur le principe d'une action agressive sur la source du signal. De tels dispositifs sont interdits par la loi dans de nombreux pays. Le principe de fonctionnement est que le détecteur capte le signal radar, le traite instantanément et le renvoie. La force du signal est telle que les données sur la vitesse du véhicule sont perdues et, par conséquent, il devient impossible de la déterminer.
Les diodes laser à large spectre sont utilisées comme détecteurs de radars laser. Pour exclure les fausses alarmes, l'ensemble du système doit être réglé pour émettre des signaux d'une fréquence, d'une puissance et d'une longueur d'onde données. Le bon fonctionnement de l'appareil dépend du nombre de capteurs dans le détecteur de radar, étant donné que 1 est capable de balayer le radar à distance, à condition que son faisceau atteigne le capteur.

D'où la conclusion : plus le radar a de capteurs, plus il est susceptible de supprimer le signal du dispositif de police de la circulation. Le même qui fonctionne sur des fréquences radio qui brouillent les signaux des radars de police.
Quel modèle choisir
Les antiradars des fabricants populaires situés sur le marché russe des accessoires automobiles peuvent être divisés de manière conditionnelle dans les catégories suivantes en termes de fonctionnalité et de coût: budget, segment de prix moyen et premium.
Lors du choix d'un radar, il est nécessaire de prendre en compte les paramètres de l'appareil qui seront les plus demandés par le conducteur :
- Protection contre les interférences et le nombre de fausses alarmes.
- Niveau de fiabilité.
- Précision des signaux enregistrés.
- Vitesse.
- Portée de réception du signal.
- Grande fonctionnalité.
Lors du choix d'un radar de classe économique, ils sont guidés non pas tant par la fonctionnalité de l'appareil que par son coût, qui dans ce cas est le facteur principal:
- ParkCity RD-11. Un appareil leader dans cette catégorie. Travaillez dans une plage de fréquences étroite. Protection peu fiable contre les interférences.
- Prestige RD-101. Bonne fixation des signaux, notification vocale avec une faible qualité d'affichage.
- Pierre d'argent F1 Fuji. Bonne fixation du signal. Il fonctionne aussi bien en mode détecteur de radar qu'en mode détecteur de radar actif. Mauvais contrôle du volume pour la distance.
Les antiradars de la catégorie de prix moyen sont choisis en tenant compte du rapport qualité/prix et de la fonctionnalité :
- Sho Me G-1000 Signature. Un appareil moderne avec un récepteur laser. Fonctionnement fiable et protection contre les fausses alarmes.
- Playme QVICK 2. L'appareil est fabriqué à l'aide de la technologie anti-CAS. Fiable avec une bonne capacité anti-brouillage.
- Inspecteur RD GTS. Dispositif de signature avec GPS et récepteur laser. Blocage fiable du signal et protection contre les interférences.
Les antiradars de catégorie Premium sont considérés non seulement pour leur fonctionnalité, mais également du point de vue des appareils qui n'ont aucune marge d'erreur :
- Whistler Pro-80ST RU Un radar moderne, multifonctionnel et compact qui répond à toutes les exigences des conducteurs. Fiable, avec une bonne rétention du signal et anti-brouillage.
- Neoline X-COP S300. Antiradar multifonctionnel, composé de 3 blocs situés sous le capot et le tableau de bord. Fixation fiable de tous les signaux, excellente protection contre les interférences.
- Playme SILENT, également appelé « brouilleur de radars », est très efficace. Fiable avec une excellente capacité anti-brouillage. Un vrai détecteur de radar est équipé d'un écran OLED et coûte cher.
Comment le faire vous-même
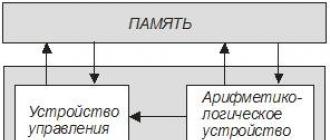
Afin de fabriquer un détecteur de radar de vos propres mains, vous devez savoir comment fonctionne le radar, qui se compose de 3 parties. Il s'agit d'un émetteur qui émet un signal radio directionnel vers le véhicule, qui rebondit après avoir rebondi sur le véhicule. La deuxième partie de l'appareil est un récepteur qui reçoit le signal radio réfléchi de la voiture. Le troisième composant du radar calcule la vitesse du véhicule à partir de la vitesse du signal radio réfléchi.

La fonction anti-radar est de recevoir le signal de l'installation radar et d'avertir en temps opportun le conducteur avec le signal. Cette fonction du dispositif de signalisation peut être remplie par n'importe quel tournevis avec indicateur sonore, conçu pour fonctionner avec un câblage électrique caché, que l'on peut trouver dans le rayon ménager de n'importe quel magasin, et il est peu coûteux.
Le schéma de fabrication anti-radar est simple. Pour ce faire, connectez la partie métallique du tournevis avec un fil à l'antenne de la voiture et connectez la terre à l'interrupteur de contact du tournevis.
Vous pouvez vérifier un tel appareil en déplacement: si sur la route un détecteur de radar fait maison se met à grincer, avertissant le conducteur, alors il y a un poste de police avec une installation radar devant. Les avis d'automobilistes qui ont testé cet appareil dans leur pratique disent que l'appareil fonctionne, mais parfois il n'y a pas assez de distance pour changer la vitesse de déplacement.
Ce que dit la loi
Dans de nombreux pays du monde, l'utilisation de détecteurs de radar même lors de la conduite de véhicules est interdite, sans parler des radars actifs. Les brouilleurs ne sont pas autorisés en tant que supports de transmission radio et relèvent de la clause administrative. Les sanctions pour les personnes utilisant un radar actif vont de 500 à 1000 roubles. avec le retrait de ces appareils.
Dans la pratique, il n'y a pas encore eu de cas de découverte de brouilleurs dans une voiture et de preuve ultérieure de leur utilisation. il est extrêmement difficile de les trouver. De plus, les agents de la police de la circulation les connaissent mal. Les dispositifs laser ne relèvent pas de la clause administrative, car ne sont pas des appareils de transmission radio.
Un de mes étudiants a eu l'idée de créer une sorte de radar pour déterminer la distance. Nous avons continué à le développer et avons décidé de l'introduire dans le programme de cours comme l'un des projets.
Après quelques semaines de préparation, nous avons enfin compris comment le démarrer et ce que nous devions peut-être faire. Le projet n'avait pas besoin d'être très avancé ; nous définissons le niveau de difficulté à moyen. Vous trouverez ci-dessous un exemple d'utilisation d'un radar personnel à portée étroite. Il était censé avoir l'air un peu drôle, alors tu peux rire !
Description et objectif du projet
Le but du projet était de créer un radar fonctionnel. Le système n'a besoin de mesurer la distance qu'à un angle de 90 degrés, comme illustré dans l'exemple ci-dessus. Selon le capteur sélectionné, le système fonctionne dans les 4-30 cm, 20-150 cm et 1-5,5 m.
Les résultats du projet influenceront les développements ultérieurs dans lesquels nous essaierons d'intégrer des radars pour la navigation de robots mobiles in vivo.
Parties éléctroniques
- Stabilisateur de tension LM7805 5 V
- Microcontrôleur PIC18F452
- Capteur IR GP2D120
- Résonateur à quartz à 4 ou 8 MHz
- Changer
- Condensateur
- connecteur 30 broches
- 5 gâchettes 74LS373
- Planche à pain
- Souder
- 36 indicateurs
- Fil 30 AWG
- Outils de fil
- Fer à souder
Liste détaillée des pièces détachées
Vous pouvez ou ne pas savoir tout sur les détails ci-dessus, donc une image de chaque détail a été incluse pour aider à les clarifier. Il y a trois nouveaux objets qui n'étaient pas spécifiés auparavant dans le projet : un système d'asservissement et des capteurs IR. La description des capteurs IR apparaîtra bientôt ; comme pour le 74HCT373, un bref aperçu sera présenté ci-dessous. Vous pouvez toujours vérifier les spécifications de la puce en recherchant simplement "74HCT373".

Un microcircuit à huit bits contenant un déclencheur à trois niveaux. En termes simples, cette puce est capable de stocker 8 bits de logique numérique et de la conserver en mémoire jusqu'à ce qu'elle soit effacée ou modifiée via la broche LE-Latch Enable.
Principes de travail
- Broches de commande LE et OE
- 8 Entrée de données D0-D7
- 8 Sortie de données D0-D7
Puissance (Vcc et GND.)
L'activation de sortie (OE) permet à Q0-Q7 de sortir les données actuellement dans les bascules D.
L'activation du déclencheur (LE) permet aux données contenues dans D0-D7 d'être écrasées dans la bascule D.
Présentation du schéma
Le schéma de ce projet est beaucoup plus compliqué que les précédents. Il y a 4 avantages principaux dans notre développement.
- Nous pourrons programmer des images à partir de la carte développée.
- Nous contrôlerons le système d'asservissement.
- Nous allons prendre les données du capteur de distance IR.
- Nous allons installer 36 indicateurs LEB pour afficher les données de sortie du capteur IR.
Caractéristiques des circuits
Nutrition
- L'alimentation est fournie par une batterie 9V connectée au LM7805 avec un condensateur 1uF connecté à la broche / à la terre pour fournir un courant continu ininterrompu au LM7805.
- Cycle de programme
- La programmation se fait en connectant deux connecteurs du contrôleur au programmateur, donnant au premier connecteur du programmateur l'accès au MCLR * / Vpp-Pin1 sur le contrôleur. Pour des raisons de sécurité, une diode de redressement est installée.
- Capteur de distance infrarouge
- Le capteur IR utilise un connecteur de contrôleur PIN 2 - RA0. Les capacités analogiques de cette sortie sont utilisées pour obtenir la valeur ADC, puisque seul le signal analogique provient du capteur IR. Cette valeur vous indique s'il y a quelque chose dans la plage du capteur.
LED d'indication
Il y a un total de 40 indicateurs LED. Chaque puce 74HCT373 contrôle jusqu'à 8 indicateurs ; puisque 40/8 = 5, nous avons besoin de 5 circuits 74HCT373 pour piloter les 40 indicateurs. Il convient de noter dans le schéma qu'un bus de données est utilisé pour les 5 puces.
Théorie
Ce développement utilise trois instruments principaux pour créer un radar personnel. Le capteur IR est connecté au microcontrôleur, puis affiché sur le segment indicateur. Une démonstration visuelle de ce processus est fournie :
Utilisation de différents capteurs
Un aspect important de la précision des capteurs IR utilisés dans ce projet est qu'ils ont les mêmes caractéristiques de tension, donc ce programme est compatible avec tous les indicateurs. La seule chose que vous devez savoir est de savoir comment le capteur est utilisé pour déterminer la distance affichée sur les indicateurs.
Usage
Jetons donc un œil à l'aspect final de l'appareil :

C'est l'apparence de l'appareil assemblé. Passons à la section suivante et continuons à assembler l'appareil.
Le boîtier en plastique au bas de la photo n'était pas mentionné dans la liste des pièces. Il s'agit d'un cas courant qui peut être acheté auprès de n'importe quel fabricant ou détaillant d'électronique. La première étape consiste à percer 36 trous pour les indicateurs dans le circuit et à y fixer les indicateurs. Un agent de fixation a été utilisé avant d'insérer les indicateurs dans les trous.

Une fois le panneau soudé, nous commençons à connecter le circuit. Chaque fil doit être connecté à travers un petit trou dans le boîtier.

La figure ci-dessus montre une première vue du panneau. Au début de la connexion des fils, il y a une accumulation d'un grand nombre d'entre eux, par exemple, comme ceci:


La touche finale dans le développement d'un radar personnel est la possibilité de l'utiliser en ligne. Les fils mesurent 2 à 4 mètres de long lors de la connexion du système d'asservissement et du capteur IR. Nous faisons un trou à l'avant du boîtier pour ces fils :
Une fois l'assemblage terminé, passons à la partie logicielle du développement. C'est de loin une partie de développement plus subtile que même le routage des fils.
Le logiciel de cet instrument se compose de trois parties principales :
- Servocommande
- LED de contrôle d'indication
- entrée A / D /
Étant donné que tous les logiciels de ce projet ne tiendront pas sur une seule page, il sera expliqué ce que sont ces parties et comment elles fonctionnent.
Servocommande
Le système d'asservissement est contrôlé par des temporisateurs et des interruptions. Deux interruptions distinctes, déclenchées simultanément pour créer le son souhaité, génèrent un signal de 50 GHz et le pointeur d'asservissement se déplace par petites étapes pour ajuster le craquement.
Régulation de l'indication LED.
Les indicateurs sont contrôlés par les déclencheurs 74LS373 / 74HCT373. Le système met constamment à jour les données de déclenchement affichées sur les indicateurs.
Entrée A/C
Le capteur IR fournit une sortie analogique. Un convertisseur est utilisé pour déterminer la valeur de tension, signalant que l'objet s'est déplacé au-delà de la plage du capteur IR.

L'assemblage et la configuration de l'appareil sont terminés - vous devez le tester. Selon le capteur que vous utilisez, l'indication sera différente. Capteurs sélectionnables GP2D120, GP2Y0A21YK et GP2Y0A700K0F.
Données et observations
Le premier test du radar sera un test à courte portée. Les boîtes de conserve étaient utilisées comme obstacles.
Sur la deuxième vidéo (sur la première page) des indicateurs de 20 cm - 150 cm et 1 m - 5,5 m sont testés, permettant de franchir des obstacles plus sérieux. Jetez un œil pour voir de quoi il s'agit.
Deux vidéos démontreront le fonctionnement du capteur, cependant, avec l'auto-assemblage, de légères difficultés sont possibles, qui seront décrites dans la conclusion.
ô vue d'ensemble du radar personnel
Il faut un peu de temps pour assembler et configurer cet appareil. C'est un projet que vous pouvez réaliser en une journée, et il a déjà un créneau d'application, mais avec le temps, des difficultés supplémentaires surgiront. Les capteurs IR peuvent devenir peu fiables et les résultats de sortie peuvent être faibles en raison des influences environnementales et environnementales.
Les actions à entreprendre
Pour augmenter le rayon de couverture du capteur, il est prévu d'utiliser des capteurs à ultrasons, équivalents aux "capteurs sonores" décrits ci-dessus, transmettant des données sur la distance entre vous et l'objet. Les ultrasons ont une portée plus large que l'infrarouge et sont plus fiables dans les environnements difficiles.
Conclusion
Le projet était une exploration amusante des capteurs infrarouges. Il démontre que les résultats peuvent être obtenus et utilisés de manière réaliste. De nombreux autres projets peuvent être développés sur cette base.