Arduino xususiyatlari juda xilma-xildir: an'anaviy haroratni boshqarish va ma'lumotlarni yig'ishdan tortib, 3D printerlarni va aqlli uylarni boshqarishgacha. Shuningdek, ushbu forum yordamida siz turli xil mexanizmlarni va hatto robotlarni dasturlashingiz mumkin. Bunday maqsadlar uchun juda tez-tez turli xil dvigatellar, motorlar va drayvlar ishlatilgan.
Mexanizmlarda eng keng tarqalgan va ommabop bo'lganlar - bu dvigatellar va servolar. Ikkinchisi haqida ushbu maqolada gaplashamiz. Servoslar eng arzon va amaliy motorlardir. Ularning o'lchami va vazni kichik va bunday modullarning kombinatsiyasi robotlarni muvaffaqiyatli yaratishga yordam beradi.
Keling, ularning eng mashhurlari bilan tanishishni boshlaymiz, boshqa yo'l bilan u SG90 (Tower Pro Micro Servo 9G) deb ham nomlanadi. Servo - bu mexanizmning o'zi yashirilgan kichik quti. Dastur kodini to'g'ri yozishni o'rganib, milning holatini boshqarishingiz mumkin.
Servo drayverni Arduino-ga ulash uchun bortda 3 ta kontakt ishlatiladi (ulanish uchun 3 ta erkak va erkak simlar ishlatiladi): quvvat manbai (5V), topraklama va analog chiqish (raqamli panelda joylashgan). Vizual ulanish diagrammasi quyidagi rasmda ko'rsatilgan:
Diqqat! Bir nechta servo yoki bitta, lekin undan ham kuchliroq ulanganda, Arduino taxtasida kuchlanish pasayishiga ruxsat berishingiz mumkin (bortda barqaror barqarorlik yo'qligi sababli) Shuning uchun, agar siz bir nechta servo ulasangiz, elektr kontaktlarini taxtadan ko'ra alohida manbaga ulash yaxshiroqdir.
Ulanganingizdan so'ng, siz Arduino IDE rivojlanish muhiti bilan tanishib, modulning sog'lig'ini tekshirish uchun birinchi dasturni sinab ko'rishingiz mumkin. Servo.h kutubxonasidan foydalanishni tavsiya etamiz. U allaqachon Arduino IDE-da yaratilgan, ya'ni uni yuklab olish va o'rnatishingiz shart emas. Aytgancha, ushbu kutubxonada ba'zi buyruqlar mavjud va shu bilan servo drayver bilan ishlashni soddalashtiradi va bizni juda uzoq va ko'p vaqt talab qiladigan kodlardan qutqaradi. Unda quyidagi foydali buyruqlar mavjud:
- biriktirmoq(output_number) - servoni ishga tushirish;
- yozing(burchak) - servoning ma'lum bir burchakka burilishi;
- o'qing() - servoning joriy burchagini olish.
Endi servo yordamida birinchi dasturni ko'rib chiqing.
Ushbu dastur vaqt o'tishi bilan servo ustidagi milning burilish burchagini o'zgartirishga imkon beradi:
# o'z ichiga olmoq; // servo servo servo bilan ishlashda kutubxonadan foydalanish; // servo o'zgaruvchini e'lon qilamiz Servo void setup () // sozlash protsedurasi (servo.attach (10); // diskni 10 portga bog'lab qo'ying) void loop () // pastadir protsedurasi (servo.write (0); // to'plam 0 kechikish ostida mil (2000); // 2 soniya kuting servo.write (180); // milni 180 kechikish ostida (2000); // 2 soniya kuting)
# o'z ichiga olmoq; // servo bilan ishlash uchun kutubxonadan foydalaning Servo servo; // Servo tipidagi servo o'zgaruvchini e'lon qiladi void setup () // o'rnatish tartibi servo. biriktirmoq (10); // diskni 10-portga bog'lab qo'ying void loop () // pastadir protsedurasi servo. yozish (0); // milni 0 ga sozlang kechikish (2000); // 2 soniya kuting servo. yozish (180); // milni 180 ga sozlang |
Robotlarni yaratish uchun eng keng tarqalgan qismlardan biri bu servo. Aslida, bu vites qutisi va o'rnatilgan potentsiometrga ega bo'lgan kichik elektr motor. Potentsiometr chiqish miliga ulanadi va uning aylanishi bilan birga uning qarshiligi o'zgaradi - shunga ko'ra, istalgan vaqtda milning holatini bilib olishingiz mumkin. An'anaviy motordan farqli o'laroq, o'rnatilgan elektronika dvigatelni uning pozitsiyasi belgilangan qiymatga mos keladigan tarzda boshqaradi
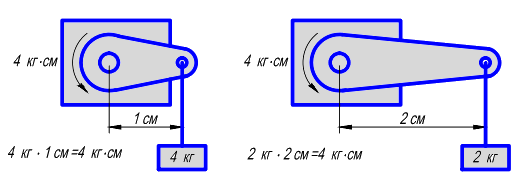
Odatda, servolar to'liq aylanish uchun mo'ljallanmagan, mil cheklangan burchakni (ko'pincha 180 daraja) aylantirishi mumkin. Bu rul g'ildiraklarini yoki manipulyatorni boshqarish uchun etarli. Shuning uchun servo drayvlar ko'pincha menteşeler uchun ishlatiladi. Servo quvvatining asosiy ko'rsatkichi, odatda kg vyrajcm bilan ko'rsatilgan moment. Yaxshi og'irlikni ko'tarishi kerak bo'lgan uzoq manipulyatorlarga 30-40 kg ⋅ va undan ko'p momentli servo drayvlar kerak bo'ladi. Agar biz servo drayverimiz bilan juda qattiq ishlamaslikni istasak, unda eng oddiylari - 1,8 yoki 3,2 kg⋅ sm. Etarli.
 Umuman olganda, moment N⋅m bilan ifodalanadi. Ammo hisob-kitoblarning soddaligi uchun bu ko'pincha kg⋅sm (1 kg⋅sm ~ 0.01 kg⋅m ~ 0.098 N⋅m) ga olib keladi, bu aylanish o'qidan ma'lum masofada servo haydovchini ta'minlay oladigan kuchdir. Ya'ni, masalan, 4 kg⋅sm uzunlikdagi servo drayv 4 kg yukni ko'tarishi mumkin, o'qdan 1 sm yoki 400 gramm, lekin allaqachon o'qdan 10 sm masofada. Agar biz manipulyator qilmoqchi bo'lsak, unda harakatlanuvchi qismlarning og'irligini hisoblashimiz va har bir qo'shilish uchun mos xizmatlarni tanlashimiz kerak.
Umuman olganda, moment N⋅m bilan ifodalanadi. Ammo hisob-kitoblarning soddaligi uchun bu ko'pincha kg⋅sm (1 kg⋅sm ~ 0.01 kg⋅m ~ 0.098 N⋅m) ga olib keladi, bu aylanish o'qidan ma'lum masofada servo haydovchini ta'minlay oladigan kuchdir. Ya'ni, masalan, 4 kg⋅sm uzunlikdagi servo drayv 4 kg yukni ko'tarishi mumkin, o'qdan 1 sm yoki 400 gramm, lekin allaqachon o'qdan 10 sm masofada. Agar biz manipulyator qilmoqchi bo'lsak, unda harakatlanuvchi qismlarning og'irligini hisoblashimiz va har bir qo'shilish uchun mos xizmatlarni tanlashimiz kerak.
Servo drayv uchta sim yordamida ulanadi - standart er-xotin kuch va er va bitta nazorat. Kam quvvatli servolar uchun uchalasini ham to'g'ridan-to'g'ri boshqaruvchiga ulash mumkin. Ammo agar biz juda ko'p servolarni yoki bir nechta, ammo kuchli narsalardan foydalansak, kontrollerning imkoniyatlari endi etarli bo'lmaydi. Tekshirish chiqishini nazorat qilish moslamasiga ulash va qolgan qismini mustaqil ravishda etkazib berish kerak.
Ko'p sonli servolarni yanada qulay ulash uchun maxsus kengaytirish kartalari mavjud, ularda har bir servo uchun kontaktlar allaqachon uchta guruhga guruhlangan bo'lib, ulanishni ancha soddalashtiradi. Ammo bu araxnidlar kabi murakkab loyihalar uchun, bu erda oyoqlarning har bir bo'g'ini alohida nazorat qilinadi. Biz to'g'ridan-to'g'ri tekshirgichga ulangan bitta servo drayv bilan eng oddiy variantni ko'rib chiqamiz.
Biz servo "5V" (qizil sim) pinidan bog'laymiz, yerni "Gnd" (qora sim) piniga ulaymiz. Boshqarish (oq sim) har qanday bepul chiqishlarga ulanishi mumkin, masalan, 2-sonli pinga (0 va 1-kontroller ketma-ket interfeys orqali aloqa qilish uchun ishlatiladi, shuning uchun ularni ishlatish tavsiya etilmaydi).

Servo-ni boshqarish uchun standart Servo sinfi ishlatiladi. Servo-ni ishga tushirish va yozish () ni boshqarish, uning harakatini boshqarish uchun bizga xizmat qiladigan (() protsedura kerak:
#include // servo bilan ishlash uchun kutubxonani ulang
servo1.write (90); // Servoga o'rta darajaga mos keladigan 90 daraja pozitsiyasini olishni buyur
Bizning dasturimizni ishga tushirganingizda, ulangan servo 90 daraja pozitsiyasini egallaydi. Agar u allaqachon bo'lsa, unda hech narsa bo'lmaydi. O'zingizning pozitsiyangizni minimaldan maksimalgacha silliq o'zgartirishga harakat qilaylik:
Servo servo1; // "servo" turidagi bitta ob'ektni yarating
int burchagi \u003d 0; // Servo pozitsiyasi saqlanadigan o'zgaruvchan
servo1.attach (2); // Biz tekshirgichga servoning boshqaruv simini pin 2 ga ulanganligini tushuntiramiz
Bu aniq kinematikaning elementi bo'lib, mexanizmlarning aniq joylashishiga erishishga imkon beradi. Ammo qadam motoridan farqli o'laroq, servo drayvda geribildirim mavjud, bu esa istalgan vaqtda milning aylanish burchagini kuzatishga imkon beradi. Qayta aloqa manbai sifatida har xil turdagi kodlovchi va potentsiometrlardan foydalanish mumkin.
Maqolada biz servoslarning deb atalmish yosh vakillari bilan bog'lanish va ishlashni ko'rib chiqamiz servos - robot quruvchilar va modelerlar orasida sevimli.
Konstruktiv
Servo mashinasi korpusdan iborat bo'lib, unda kichik kollektorli elektr motor, vites qutisi va boshqaruv elektronikasi joylashtirilgan.
Potentsiometrlar geribildirim sifatida ishlatiladi. Shuning uchun ushbu servolarda eksa atrofida milning aylanish burchagi bo'yicha cheklovlar mavjud. Shunday qilib, men sotib olgan Futaba S3003-da, chiqish milining aylanish burchagi 225 °.
Texaba xususiyatlari Futaba S3003
Parametr
Ta'minot kuchlanishi
4,8
6,0
Mil kuchi
3,2
kg / sm
4,1 kg / sm
Tezlik joylashishni aniqlash
0,23 sek / 60 °
0,19 sek / 60 °
Hajmi L x W x H
41m x 20mm x 36mm
Massa g 37
Qayta aloqa potansiyometri to'g'ridan-to'g'ri chiqish miliga o'rnatiladi, buning natijasida servo boshqaruv bloki milning aniq holatini kuzatadi: potentsiometrga qarshilik mutanosib ravishda o'zgaradi burilish burchagi . Qarshilikni o'qib chiqib, boshqaruv bloki ushbu qiymatni milning ma'lum bir pozitsiyasida bo'lishi kerak bo'lgan qiymat bilan taqqoslaydi. Agar bu qiymatlar boshqacha bo'lsa, boshqaruv bloki dvigatelga qiymatlarni farqini kamaytirib, ma'lum bir yo'nalishda aylanishni buyuradi. Potentsiometrdan olingan qiymat belgilangan qiymatga to'g'ri kelganda, milning holatiga etib borgach, vosita to'xtaydi. Potentsiometrdan qiymatni o'qish va uni taqqoslash yuqori chastotada sodir bo'ladi, shuning uchun tashqi yuk o'zgarganda chiqish mil oldindan aniqlangan pozitsiyani egallashga moyil bo'ladi.
Servo mashinasining dizayni shunday ishlaydi, dvigateldan chiqish miliga tork katta tishli nisbati bo'lgan vites qutisi orqali uzatiladi, shuning uchun kichik o'lchamlari va energiya sarfi bilan servo mashinalar ajoyib tortishishlarni ta'minlaydi.
Boshqaruv
Tekshirish signali 20 ms va davomiyligi 0,8 dan 2,2 ms gacha bo'lgan puls signalidir. Bu servo boshqaruv standartining bir turi. Darbeli zarba qancha uzoqroq bo'lsa, servo mil aylanish burchagi qanchalik katta bo'ladi.Servo tezlashishi uchun pulsning takrorlanish davri 10 msgacha qisqartirilishi mumkin.

Nazorat signali S signal signali orqali servoga yuboriladi. Mening servoimda u oq, ba'zi modellarda u sariq rangda. Signal simiga qo'shimcha ravishda servo - elektr uzatish liniyalari - tuproq (qora) va quvvat (qizil) dan ikkita sim chiqadi.

Dastur qismi
Ko'rib turganingizdek, servoni boshqarish juda oddiy - shunchaki zarba signalini kerakli chastota va vazifa aylanishi bilan haydang. Ushbu signal PWM tomonidan yaratilishi mumkin yoki o'zingizning taymeringizni kesish jarayonini yozishingiz mumkin. Ammo Bascom-AVR-da servolarni boshqarish uchun o'rnatilgan buyruq mavjud -Servo
. Biz buni ko'rib chiqamiz.
Avval servolarning ulanishini sozlashingiz kerak:
Konfiguratsiya Servos \u003d X, Servo1 \u003d Portb. 0, Servo2 \u003d Portb. 1, qayta yuklash \u003d Var
Servoslar= X ; ulangan servolar soni ko'rsatilgan, 14 servgacha ulanish mumkin.
Servo1= Portb. 0 ; birinchi servoning ulanish portini bildiradi
Servo2= Portb. 1 ; ikkinchi servoning ulanish portini bildiradi
Qayta yuklang= Var;bu erda Var taymer tanaffuslari orasida o'tgan mikrosaniyaviy vaqt.
Odatiy bo'lib, Timer0 tanaffuslarni tashkil qilish uchun ishlatiladi, shuning uchun siz uni o'zingizning maqsadlaringiz uchun ishlata olmaysiz. Bascom-AVR sizga uzilish xizmatini boshqa har qanday taymerga o'tkazishga imkon beradi, masalan, Timer0-ni bo'shatish va Timer1-ni o'chirish, buni faqat konfiguratsiya satrida belgilang:
Konfiguratsiya
Servos \u003d 2, Servo1 \u003d Portb. 0, Servo2 \u003d Portb. 1, qayta yuklash \u003d 10, Taymer=
Taymer1
Hamma narsa sozlanganidan so'ng, bizning servo mashinamizni boshqarish uchun qoladi. Bu quyidagi buyruq bilan amalga oshiriladi
Servo( a ) \u003d F
a - servoning seriya raqami
F - qiymati servo milning aylanish burchagini belgilaydigan o'zgaruvchan
Umuman sinov kodi:
$ regfile
\u003d "m8def.dat" "ATmega8 mikrokontrolleri
$ kristal
=
8000000
"ish chastotasi 8 MGts
"servolarni ulash uchun portlarni sozlash."
Konfiguratsiya
Portb. 0 \u003d Chiqish
Konfiguratsiya
Portb. 1 \u003d Chiqish
"ikkita servo ulanishni sozlash
Konfiguratsiya
Servos \u003d 2, Servo1 \u003d Portb. 0, Servo2 \u003d Portb. 1, qayta yuklash \u003d 15
Xiralashgan
F SifatidaBayt"birinchi servo uchun o'zgaruvchan
Xiralashgan
S SifatidaBayt"ikkinchi servo uchun o'zgaruvchan
"uzilishlarga ruxsat berish
Yoqish
Tanaffuslar
F=
15
"o'zgaruvchining qiymati servo milning aylanish burchagini belgilaydi."
S=
70
Qilish
Servo(1) \u003d F
Servo(2) \u003d S
Loop
Tugatish
Men ulanish sxemasini bermayman, menimcha bitta signal simi muammoga olib kelmaydi;) U to'g'ridan-to'g'ri mikrokontrolör portiga ulanishi mumkin yoki uni qayta sug'urta qilish uchun ikki yuzlab ohmli rezistor orqali ulash mumkin.
F va S o'zgaruvchilarning qiymatlarini o'zgartirib, navbati bilan birinchi va ikkinchi servolarning burilish burchagini o'zgartirishimiz mumkin. Qayta yuklash parametri qanchalik past bo'lsa, bizning servolarimiz kerakli burchakka tez aylanadi.
Mening xizmatim uchun men ishchi doirasini oldimu Servo (a) ni biladi, unda mil aylanishi mumkin. Mil 0 va 150 qiymatida ekstremal holatni egallaydi, mos ravishda 75 qiymatida, mil oraliq pozitsiyani egallaydi.



Servo (a) \u003d 0 Servo (a) \u003d 75 Servo (a) \u003d 150
Servo motorlari DC / AC yoki step motorlari kabi doimiy ravishda aylanmaydigan elektromexanik drayverlarning bir turidir, ammo ma'lum bir pozitsiyaga o'tadi va uni tejaydi. Ular doimiy aylanish talab qilinmaydigan joylarda qo'llaniladi. Servo drayvlar ma'lum bir pozitsiyaga o'tish uchun zarur bo'lgan joyda qo'llaniladi, so'ngra pozitsiyani to'xtatish va ushlab turishKo'pincha servo motorlardan samolyotlar va qayiqlarning boshqaruv holatini boshqarish uchun foydalaniladi. Servo drayvlar ushbu sohalarda samarali qo'llaniladi, chunki rulni 360 darajaga o'tkazish kerak emas va g'ildiraklar kabi doimiy aylanishni talab qilmaydi. Servo drayvlarda geribildirim mexanizmi ham qo'llaniladi, shuning uchun u joylashishni aniqlashda xatolarni bartaraf qilishi va ularni tuzatishi mumkin. Bunday tizim deyiladi tomosha qilish. Shunday qilib, agar havo oqimi Rulda-osiyoga bosim o'tkazsa va uni qaytarib yuborsa, haydovchi teskari yo'nalishda kuch ishlatadi va xatoni tuzatishga harakat qiladi.Masalan, agar siz servoga 30 darajaga borib, qulflashni aytsangiz va uni qo'l bilan burishga harakat qilsangiz, servo kuchni engib o'tishga harakat qiladi. berilgan burchakni saqlang.
Servo drayvlar, shuningdek, RC avtomashinalari, robototexnika va boshqalarning rulini boshqarish uchun ishlatiladi.Servoslarning ko'p turlari mavjud, ammo bu erda biz to'xtalamizdeb ataladigan kichik servolarsevimli mashg'ulot. Hobby dvigatel va uni boshqarish mexanizmibitta birlikda birlashtirilgan.Ulanish uchta ulash simlari yordamida amalga oshiriladi. Biz servo ishlatamizFutabaS3003.
FutabaS3003 o'tkazgichlari.
1.RED -\u003e Joyni boshqarish, quvvat + 4,8V dan 6V gacha
2.BLACK-\u003e Yer
3.WHITE -\u003e Boshqarish signali.
Servo nazorati.
Servo drayverni mikrokontroller yordamida boshqarish juda oson, tashqi drayverlarga ehtiyoj sezilmaydi, faqat nazorat signalini berib, servo drayver har qanday burchak ostida joylashadi.Boshqarish signalining chastotasi odatda 50hz(ya'ni, 20 ms davr) va yurak urish davomiyligi burchakni o'rnatadi.
Uchun FutabaS3003quyidagi sinxronizatsiyani aniqladiServo drayvning puls kengligi va aylanish burchagi o'rtasidagi bog'liqlik quyida keltirilgan: ushbu servo haydovchi faqat 0 va 180 daraja atrofida aylanishi mumkinligini unutmang.
- 0.388ms \u003d 0 daraja.
- 1.264ms \u003d 90 daraja.
- (Neytral pozitsiya)2.14ms \u003d 180 daraja.
Servo vosita nazorati.
Servomotorlarni boshqarish uchun PWM funktsiyasi bilan AVR mikrokontrolleridan foydalanishingiz mumkin. Shunday qilib, PWM avtomatik ravishda servo blokirovka signalini yaratadi va nazorat qilish markaziy protsessori boshqa vazifalar uchun bo'shatiladi.PWM-ni qanday sozlashingiz va undan foydalanishingiz mumkinligini tushunish uchun siz AVR-da apparat taymerlari va PWM modullari haqida asosiy ma'lumotga ega bo'lishingiz kerak.
Bu erda biz AVR Timer modulidan foydalanamiz,qaysi16bit taymer va ikkita PWM kanaliga ega (A va B).
Protsessor chastotasi 16 MGts, bu chastota ko'p AVR-lar ishlay oladigan maksimal chastotadir, shuningdek biz 64 ga teng chastota bo'luvchisidan foydalanamiz.Shunday qilib, taymer 16MHz / 64 \u003d 250 ks (4 ms) ni qabul qiladi va taymer 14 rejimiga o'rnatiladi.
Taymerning vazifalari 14
- Tez PWM rejimi
- TT OP qiymati \u003d ICR1

Shunday qilib, biz ICR1A \u003d 4999 ni o'rnatdik, bu bizga 20W (50 Gts) PWM davri beradi.SOM1A1, COM1A0 (PWM kanali uchun) va COM1B1, COM1B0 (PWM kanali uchun) uchun to'g'ri sozlamalar chiqish rejimiga o'rnatilganligiga ishonch hosil qiling.
COM1A1 \u003d 1 va COM1A0 \u003d 0 (PWM manbai)
COM1B1 \u003d 1 va COM1B0 \u003d 0 (PWM kanali B)
Endi vazifa tsiklini OCR1A va OCR1B registrlarini o'rnatish orqali o'rnatish mumkin, bu ikkita PWM davr registrlari Taymer davri 4 ms bo'lgani uchun(16 MGts 64 ga bo'linganligini eslang), biz servo ma'lum bir burchakka aylantirish uchun zarur bo'lgan qiymatlarni hisoblashimiz mumkin.
§ Servo burchagi 0 daraja, yurak urish kengligi 0.388ms (388uS) talab qiladi, shuning uchun OCR1A \u003d 388us / 4us \u003d 97 qiymati
§ Servo 90 graduslik burchakka puls kengligi 1,264ms (1264uS) kerak, shuning uchun OCR1A \u003d 1264us / 4us \u003d 316 qiymati
§ Servo burchagi 180 daraja, impuls kengligi 2,140 mm (2140uS) ni tashkil qiladi, shuning uchun OCR1A \u003d 2140us / 4us \u003d 535 qiymati
Shunday qilib biz qila olamizqiymatni hisoblashOCR1A (yoki ikkinchi servo haydovchi uchun OCR1B) har qanday burchak uchun OCR1x qiymati 0 dan 180 darajagacha bo'lgan burchaklar uchun 97 dan 535 gacha o'zgarishini unutmang.
Dvigatelni boshqarish dasturi.
Quyidagi demo dasturi AVR mikrokontrolörü bilan servo motorlarni qanday ishlatishni ko'rsatib beradi. Dasturning ishlashi juda oson, u taymerni va PWMni ishga tushirish bilan boshlanadi, boshida servo 0 darajaga o'rnatiladi, keyin 90 darajaga, bir muncha vaqt o'tgach esa 135 darajaga va oxirida 180 darajaga ko'tariladi. Ushbu jarayon drayverni quvvatlantirishga qadar takrorlanadi.
Dasturning to'g'ri ishlashi uchun parametrlar.
- Kam Sug'urta \u003d 0xFF va Yuqori sug'urta \u003d 0xC9
- Chastotasi \u003d 16 MGts.
- Servo motorli brend Futaba s3003.
- MCU - bu AtMega32 yoki ATmega16 bitta chipli mikrokontroler.
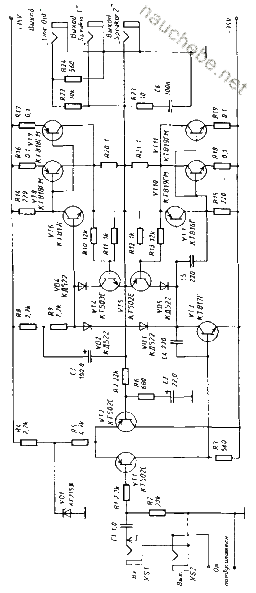
Sxema

QO'LLANILISh:
Avtomatlashtirilgan boshqaruv tizimlari bizning kundalik hayotimizga kirib kelganiga qaramay, servo drayver haqida hamma ham bilmaydi. Bu nima? Bu juda aniq dinamik jarayonlarni amalga oshiradigan tizim. Qurilma kerakli tezlikni, pozitsiyani va momentni ta'minlaydigan vosita, sensor va boshqaruv blokidan iborat.
Servo drayvlar turli xil kuchaytirgichlar va regulyatorlarni o'z ichiga oladi, ammo atama salbiy pozitsiyali geribildirim bilan elektr drayverni belgilashda ko'proq avtomatik tizimlarda qo'llaniladi. Tekshirish signali qo'llanilganda elektr motorini sozlash asos bo'ladi.
Servo qanday tartibga solingan
Qurilmaning dizayni va ishlashini hisobga olsangiz, nimani tushunish osonroq. Elektromexanik servo montaj bitta korpusda joylashgan. Uning xususiyatlari dizayn, ish kuchlanishi, chastota va moment. Sensorning o'qishiga ko'ra, servomotorning ishlashini sozlash uchun nazoratchi yoki mikrosxemadan signal qabul qilinadi.
Eng oddiy qurilma - bu DC vosita, boshqaruv davri va potentsiometr. Dizayn chiqish milining ma'lum bir tezligini olish uchun vites qutisining mavjudligini ta'minlaydi.
Tekshirish davri
Servo drayverni zarba generator rejimida NE555 taymeriga ega oddiy zanjir yordamida ulash mumkin.

Dvigatel milining holati o'zgaruvchan qarshilik R 1 tomonidan o'rnatiladigan puls kengligi bilan belgilanadi. Signallar generator tomonidan doimiy ravishda chiqarilishi kerak, masalan har 20 ms. Buyruq qabul qilinganda (rezistor slayderini siljitish), vites qutisining chiqish mili aylanadi va ma'lum bir joyga o'rnatiladi. Tashqi ta'sir bilan u qarshilik ko'rsatib, o'z o'rnida qolishga harakat qiladi.
Isitish tizimini mexanik tartibga solish
Servo - bu nima? Buni uning er osti isitish tizimidagi sovutish suvi oqimini tartibga soluvchi qurilma sifatida ishlashi yaxshi tushunadi. Agar siz buni qo'lda qilsangiz, doimiy ravishda manifoldlardagi klapanlarni burishingiz kerak bo'ladi, chunki isitish davrlariga etkazib beriladigan issiq suvning oqimi o'zgaruvchan.
Er osti isitish tizimlarini avtomatik tartibga solish uchun turli xil qurilmalar qo'llaniladi. Eng oddiy - bu nazorat valfiga o'rnatilgan termal bosh. U mexanik sozlash tugmasidan, kamon mexanizmidan va itargichga ulangan qo'ng'iroqdan iborat. Kovaklar ichidagi harorat oshib borishi bilan toluol isitiladi, bu esa valf sopini kengaytiradi va bosadi, uni yopadi. Sovutish suvi oqimi yopiladi va isitish pallasida soviy boshlaydi. Belgilangan darajaga sovutilganda, ko'llar yana valfni ochadi va tizimga issiq suvning yangi qismi kiradi.
Mexanik regulyatorlar iliq qavatning har bir pallasida o'rnatiladi va qo'lda sozlanadi, shundan so'ng harorat avtomatik ravishda doimiy ravishda ushlab turiladi.
Isitish uchun elektr servo
Keyinchalik rivojlangan qurilma - bu isitish yoki er osti isitish uchun elektr servo. Ichki havo haroratini ushlab turish uchun o'zaro bog'liq mexanizmlar tizimini o'z ichiga oladi.

Isitish uchun servo devorga o'rnatilgan termostat bilan birgalikda ishlaydi. Elektr kran besleme quvuriga, suv isitiladigan qavat kollektori oldida o'rnatiladi. Keyin ulanish amalga oshiriladi, 220 V quvvat manbai va belgilangan rejimni termostatga o'rnatish. Tizim ikkita sensor bilan jihozlangan: biri polda, ikkinchisi xonada. Ular buyruqlarni kranga ulangan servo boshqaradigan termostatga yuboradilar. Agar ko'chada boshqa asbob o'rnatsangiz, tartibga solish aniqligi yanada yuqori bo'ladi, chunki iqlim sharoiti doimiy ravishda o'zgarib turadi va xonalardagi haroratga ta'sir qiladi.
Servo drayveri ikki yoki uch tomonlama valfni boshqaradi. Birinchisi isitish tizimidagi sovutish suvi haroratini o'zgartiradi. Servo-aktuatorli uch tomonlama valf haroratni doimiy ravishda ushlab turadi, ammo kontaktlarning zanglashiga etkazilgan issiq suvning oqim tezligini o'zgartiradi. Bittasida issiq suyuqlik (ta'minot trubkasi) va sovuq (qaytish) uchun 2 kirish mavjud. Buning birgina yo'li bor, u orqali harorat berilgan aralashma oziqlanadi. Vana aralashtirish oqimlarini ta'minlaydi, shu bilan kollektorlarga issiqlik oqimini boshqaradi. Agar kirishlardan biri ochilsa, ikkinchisi orqada yashira boshlaydi. Bunday holda, chiqish oqimi tezligi doimiy bo'lib qoladi.

Servo yuklash qopqog'i
Zamonaviy avtomobillar asosan magistralni avtomatik ochish va yopish bilan ishlab chiqariladi. Bu servo o'rnatishni talab qiladi. Ishlab chiqaruvchilar shunga o'xshash variantni avtomobil bilan ta'minlashning 2 usulini qo'llaydilar. Ishonchli variant - bu pnevmatik aktuator, ammo u ko'proq xarajatlarni talab qiladi. Drayv tanlash uchun bir necha usul bilan boshqariladi:
- masofadan boshqarish pultidan;
- haydovchining eshik panelidagi tugma;
- magistral qopqog'ini ushlang.
Qo'l bilan ochish har doim ham qulay emas, ayniqsa qishda, qulf muzlashi mumkin. Boot servo qulf bilan biriktirilgan, bu qo'shimcha ravishda avtoulovni ruxsatsiz kirishdan himoya qiladi.
Qurilmalar xorijiy avtoulovlarda qo'llaniladi, ammo agar so'ralsa, ularni mahalliy modellarga o'rnatish mumkin. Elektr dvigatelli haydovchidan foydalanish afzalroq.

Hali ham magnit plitalari bo'lgan qurilmalar mavjud, ammo ular yanada murakkab va kamroq ishlatiladi.
Eng arzonlari faqat ochish uchun mo'ljallangan elektr jihozlari. Harakat qilishda to'siq paydo bo'lganda uzilgan inertial mexanizmi bo'lgan elektr motoridan iborat yuklash diskini olishingiz mumkin. Qimmat modellar qopqoqni ko'tarish va tushirish moslamasidan, yopilish mexanizmidan, tekshirgichdan va sensordan iborat.
Yuklash qopqog'ining servo motorini o'rnatish va sozlash zavodda amalga oshiriladi, ammo oddiy qurilmalarni o'z-o'zidan o'rnatish mumkin.

Servo xususiyatlari
Qurilmalar analog va raqamli turlarda mavjud. Tashqi haydovchilar bir-biridan farq qilmaydi, ammo ular orasidagi farq katta. Ikkinchisi buyruqlarni aniqroq ishlab chiqadi, chunki nazoratni mikroprotsessorlar bajaradi. Servoslar uchun dasturlar yoziladi va kiritiladi. Analog qurilmalar mikrochip signallarida ishlaydi. Ularning afzalliklari oddiy qurilma va past narx.
Tanlashning asosiy parametrlari quyidagilardan iborat:
- Oziqlantirish Kuchlanish uchta sim orqali uzatiladi. Puls oq, qizil rang orqali uzatiladi - ish kuchlanishi, qora yoki jigarrang neytral.
- O'lchamlari: katta, standart va mikro qurilmalar.
- Tezlik. Bu milning qaysi vaqt davomida 60 0 burchak ostida aylanishiga bog'liq. Arzon qurilmalar 0,22 soniya tezlikka ega. Agar yuqori ishlash talab etilsa, u 0,06 soniyani tashkil qiladi.
- Lahzaning kattaligi. Parametr ustuvor hisoblanadi, chunki kichik moment bilan boshqarish qiyin.
Raqamli servoni qanday boshqarish kerak?
Drayvlar dasturlashtiriladigan boshqaruvchilarga ulangan, ularning orasida Arduino ham yaxshi ma'lum. Uning taxtasiga ulanish uchta sim bilan amalga oshiriladi. Quvvat voltaji ikkitadan, uchinchisida nazorat signali beriladi.

Raqamli boshqariladigan servo yo'riqnoma boshqaruvchiga potentsiometrdan o'qishni o'qiy oladigan va ularni raqamga tarjima qila oladigan oddiy dasturga ega bo'lishni ta'minlaydi. Keyin servo milni oldindan belgilangan joyga qaytarish uchun uzatish buyrug'iga aylantiriladi. Dastur diskka yoziladi va keyin uni boshqaruvchiga uzatiladi.
Xulosa
Servoni batafsil ko'rib chiqdik. Dvigatel milini oldindan belgilangan holatda aylantirish va ushlab turish kerak bo'lganda, turli xil jarayonlarni avtomatlashtirish zarur bo'lganda nima aniq bo'ladi. Qurilmalar mavjud analog va raqamli. Ikkinchisida yuqori aniqlik, yuqori quvvat va joylashishni aniqlash aniqligi tufayli kengroq qo'llanma topildi.